Poster
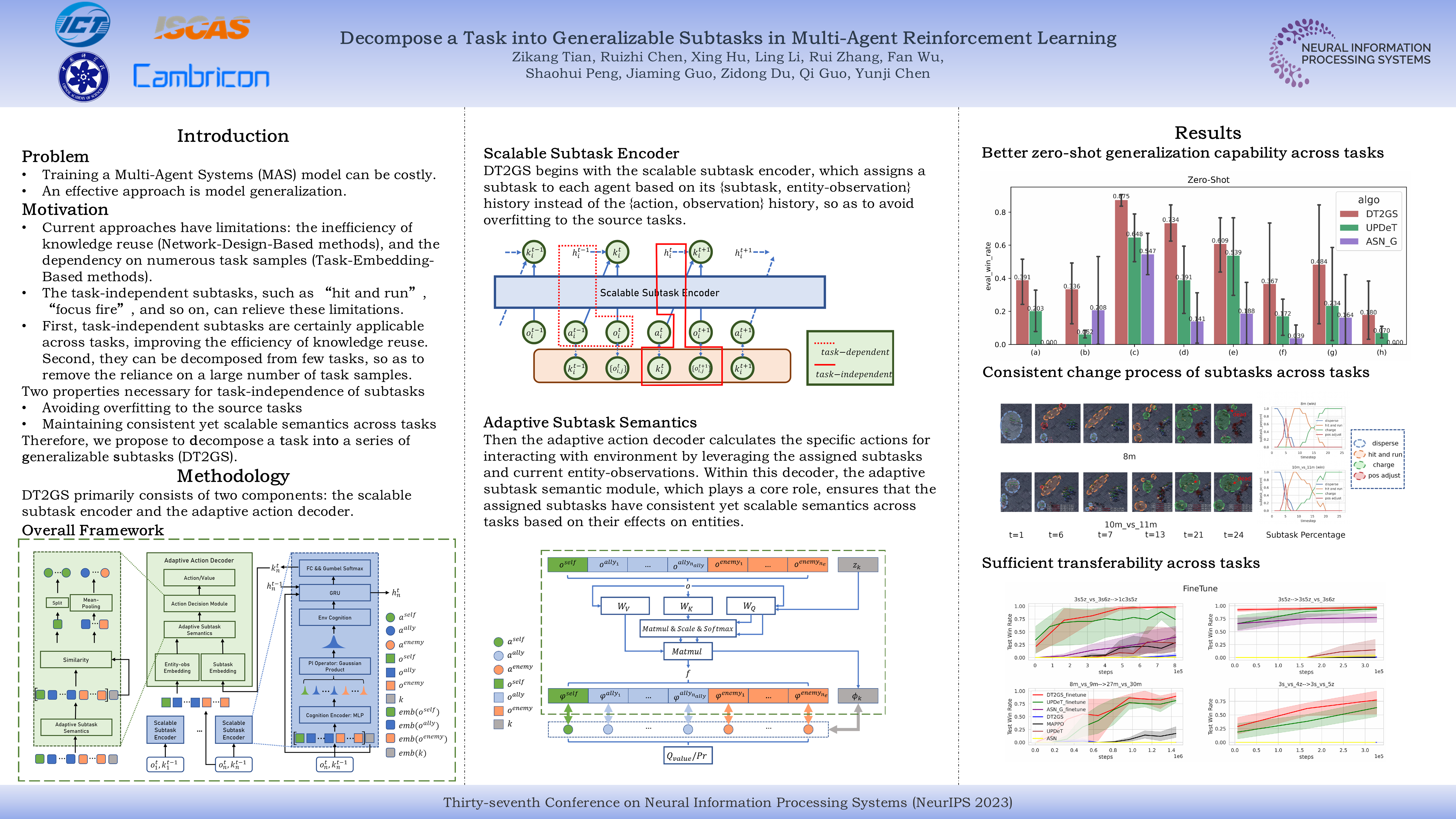
Decompose a Task into Generalizable Subtasks in Multi-Agent Reinforcement Learning
Zikang Tian · Ruizhi Chen · Xing Hu · Ling Li · Rui Zhang · Fan Wu · Shaohui Peng · Jiaming Guo · Zidong Du · Qi Guo · Yunji Chen
Great Hall & Hall B1+B2 (level 1) #1505
{kind=link}
In recent years, Multi-Agent Reinforcement Learning (MARL) techniques have made significant strides in achieving high asymptotic performance in single task. However, there has been limited exploration of model transferability across tasks. Training a model from scratch for each task can be time-consuming and expensive, especially for large-scale Multi-Agent Systems. Therefore, it is crucial to develop methods for generalizing the model across tasks. Considering that there exist task-independent subtasks across MARL tasks, a model that can decompose such subtasks from the source task could generalize to target tasks. However, ensuring true task-independence of subtasks poses a challenge. In this paper, we propose to \textbf{d}ecompose a \textbf{t}ask in\textbf{to} a series of \textbf{g}eneralizable \textbf{s}ubtasks (DT2GS), a novel framework that addresses this challenge by utilizing a scalable subtask encoder and an adaptive subtask semantic module. We show that these components endow subtasks with two properties critical for task-independence: avoiding overfitting to the source task and maintaining consistent yet scalable semantics across tasks. Empirical results demonstrate that DT2GS possesses sound zero-shot generalization capability across tasks, exhibits sufficient transferability, and outperforms existing methods in both multi-task and single-task problems.