Poster
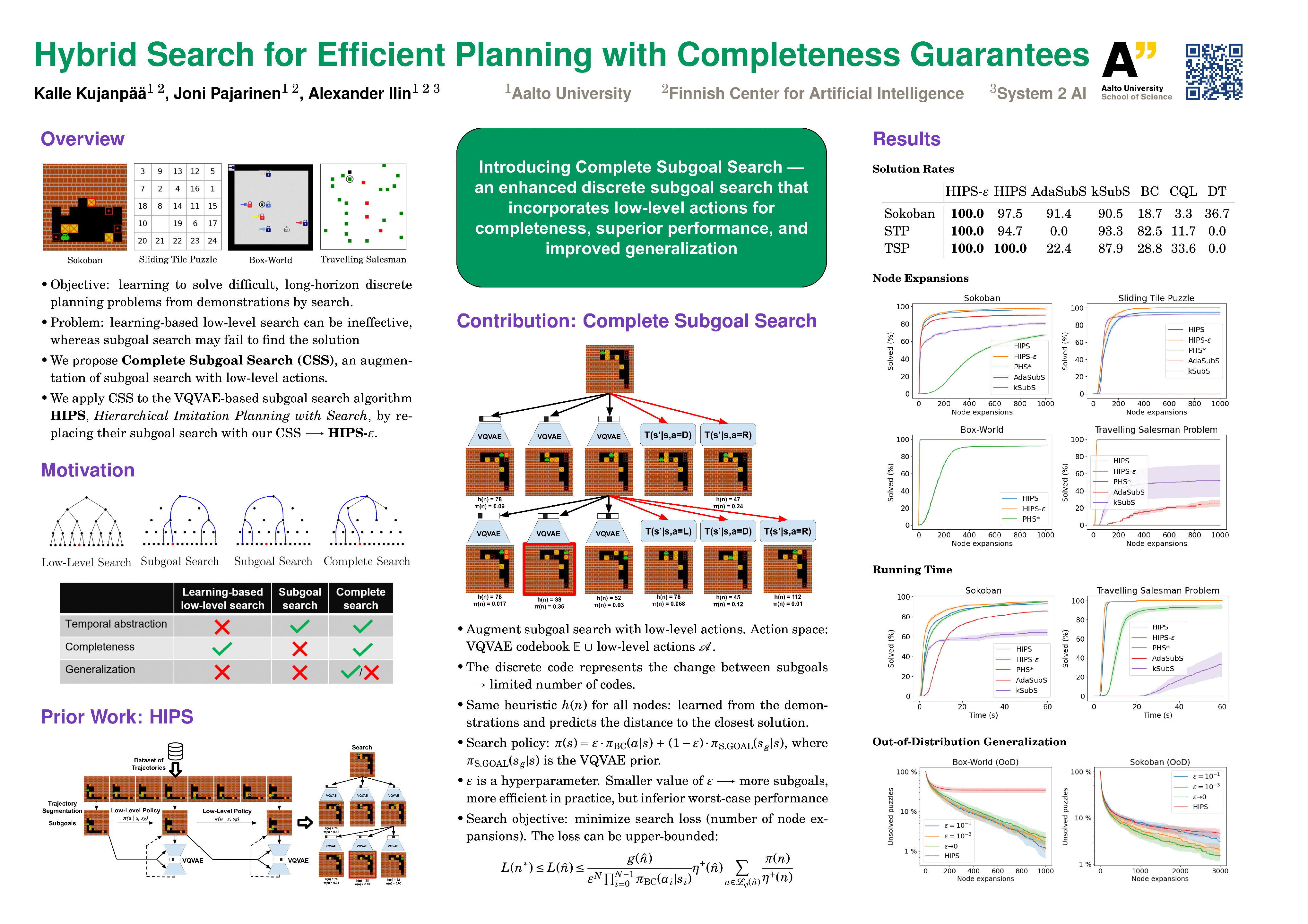
Hybrid Search for Efficient Planning with Completeness Guarantees
Kalle Kujanpää · Joni Pajarinen · Alexander Ilin
Great Hall & Hall B1+B2 (level 1) #1509
{kind=link}
Solving complex planning problems has been a long-standing challenge in computer science. Learning-based subgoal search methods have shown promise in tackling these problems, but they often suffer from a lack of completeness guarantees, meaning that they may fail to find a solution even if one exists. In this paper, we propose an efficient approach to augment a subgoal search method to achieve completeness in discrete action spaces. Specifically, we augment the high-level search with low-level actions to execute a multi-level (hybrid) search, which we call complete subgoal search. This solution achieves the best of both worlds: the practical efficiency of high-level search and the completeness of low-level search. We apply the proposed search method to a recently proposed subgoal search algorithm and evaluate the algorithm trained on offline data on complex planning problems. We demonstrate that our complete subgoal search not only guarantees completeness but can even improve performance in terms of search expansions for instances that the high-level could solve without low-level augmentations. Our approach makes it possible to apply subgoal-level planning for systems where completeness is a critical requirement.