Poster
Constrained Policy Optimization with Explicit Behavior Density For Offline Reinforcement Learning
Jing Zhang · Chi Zhang · Wenjia Wang · Bingyi Jing
Great Hall & Hall B1+B2 (level 1) #1418
{kind=link}
Abstract:
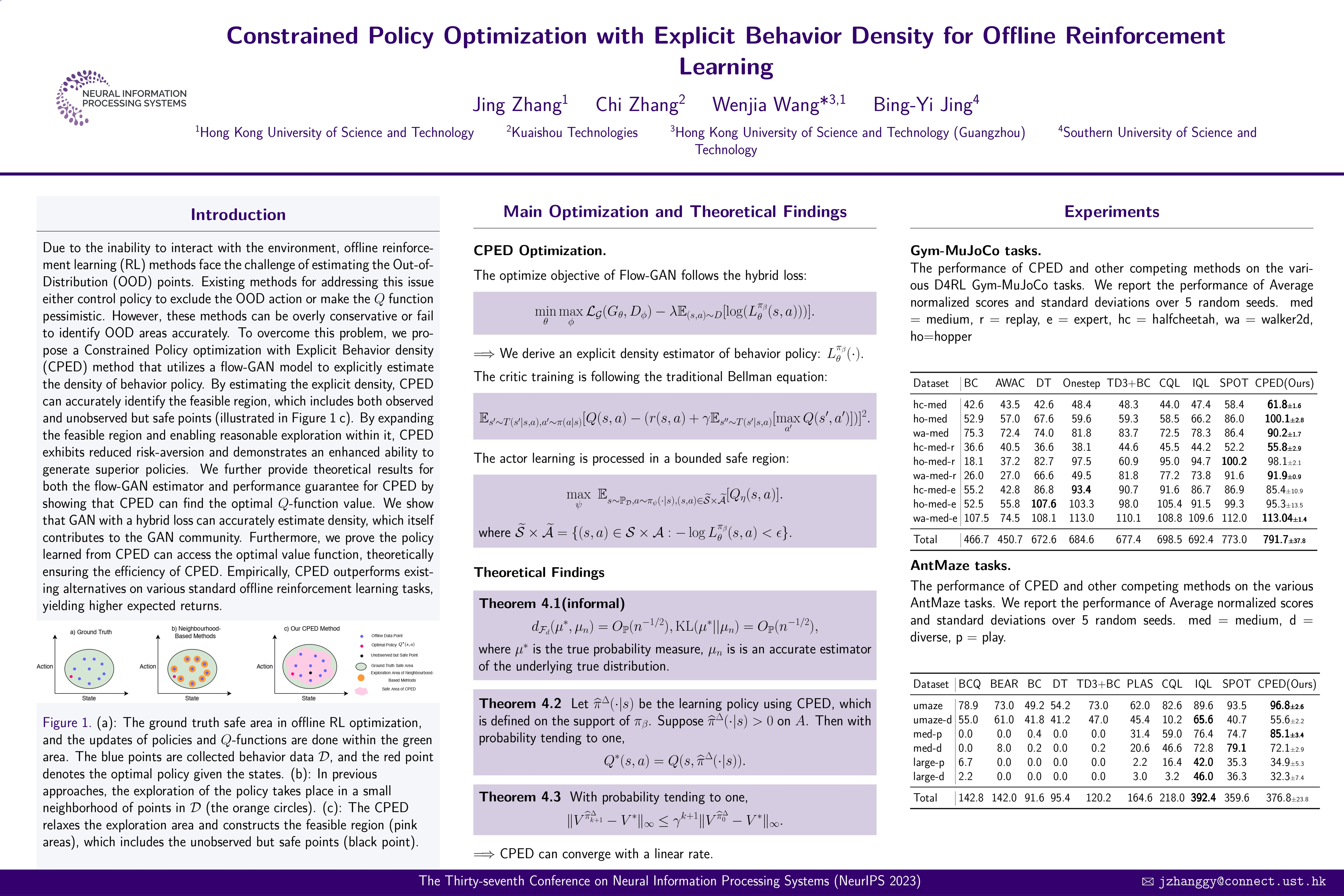
Due to the inability to interact with the environment, offline reinforcement learning (RL) methods face the challenge of estimating the Out-of-Distribution (OOD) points. Existing methods for addressing this issue either control policy to exclude the OOD action or make the $Q$ function pessimistic. However, these methods can be overly conservative or fail to identify OOD areas accurately. To overcome this problem, we propose a Constrained Policy optimization with Explicit Behavior density (CPED) method that utilizes a flow-GAN model to explicitly estimate the density of behavior policy. By estimating the explicit density, CPED can accurately identify the safe region and enable exploration within the region, resulting in less conservative learning policies. We further provide theoretical results for both the flow-GAN estimator and performance guarantee for CPED by showing that CPED can find the optimal $Q$-function value. Empirically, CPED outperforms existing alternatives on various standard offline reinforcement learning tasks, yielding higher expected returns.
Chat is not available.