Poster
Query-based Temporal Fusion with Explicit Motion for 3D Object Detection
Jinghua Hou · Zhe Liu · dingkang liang · Zhikang Zou · Xiaoqing Ye · Xiang Bai
Great Hall & Hall B1+B2 (level 1) #121
{kind=link}
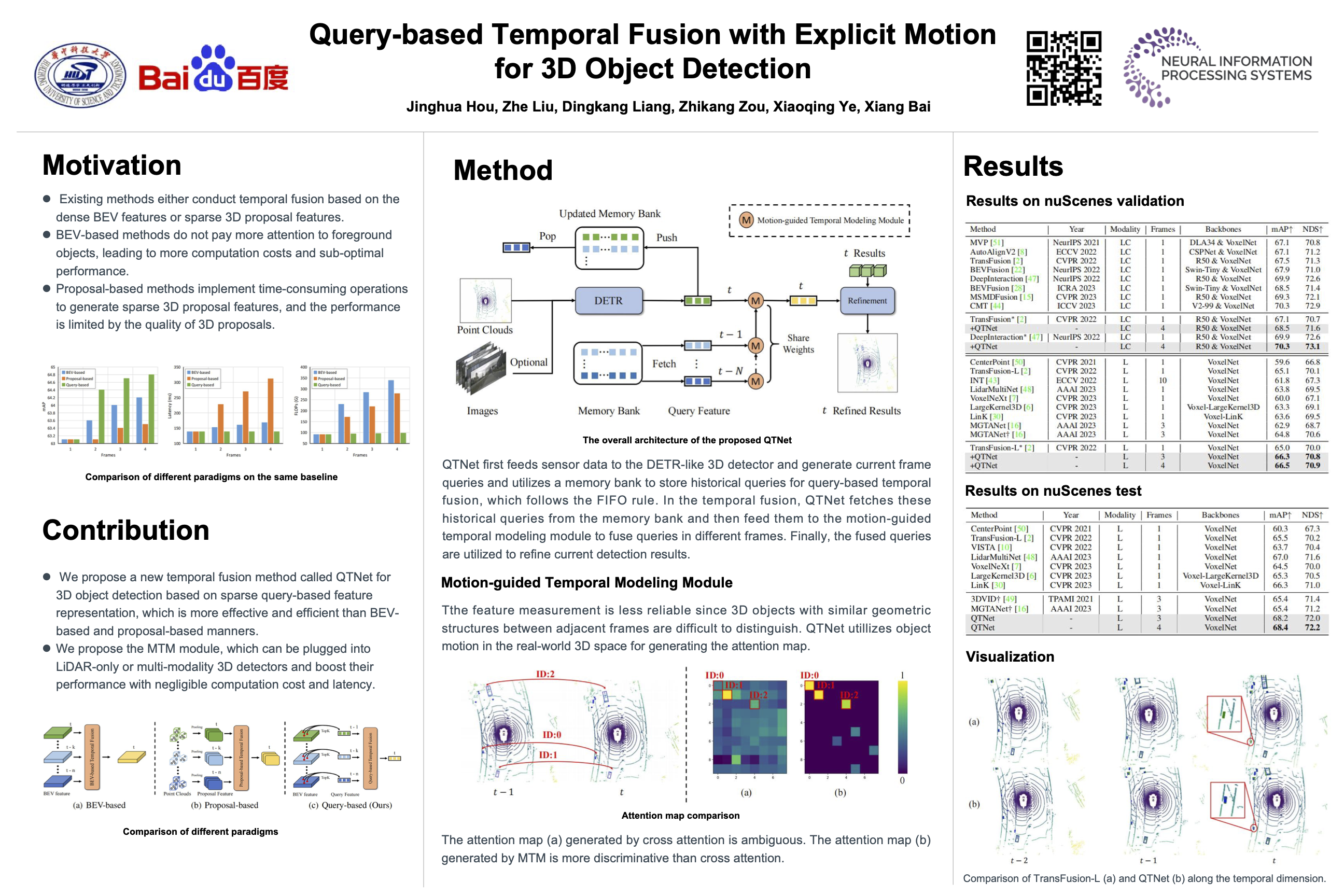
Effectively utilizing temporal information to improve 3D detection performance is vital for autonomous driving vehicles. Existing methods either conduct temporal fusion based on the dense BEV features or sparse 3D proposal features. However, the former does not pay more attention to foreground objects, leading to more computation costs and sub-optimal performance. The latter implements time-consuming operations to generate sparse 3D proposal features, and the performance is limited by the quality of 3D proposals. In this paper, we propose a simple and effective Query-based Temporal Fusion Network (QTNet). The main idea is to exploit the object queries in previous frames to enhance the representation of current object queries by the proposed Motion-guided Temporal Modeling (MTM) module, which utilizes the spatial position information of object queries along the temporal dimension to construct their relevance between adjacent frames reliably. Experimental results show our proposed QTNet outperforms BEV-based or proposal-based manners on the nuScenes dataset. Besides, the MTM is a plug-and-play module, which can be integrated into some advanced LiDAR-only or multi-modality 3D detectors and even brings new SOTA performance with negligible computation cost and latency on the nuScenes dataset. These experiments powerfully illustrate the superiority and generalization of our method. The code is available at https://github.com/AlmoonYsl/QTNet.