Poster
Environment-Aware Dynamic Graph Learning for Out-of-Distribution Generalization
Haonan Yuan · Qingyun Sun · Xingcheng Fu · Ziwei Zhang · Cheng Ji · Hao Peng · Jianxin Li
Great Hall & Hall B1+B2 (level 1) #625
{kind=link}
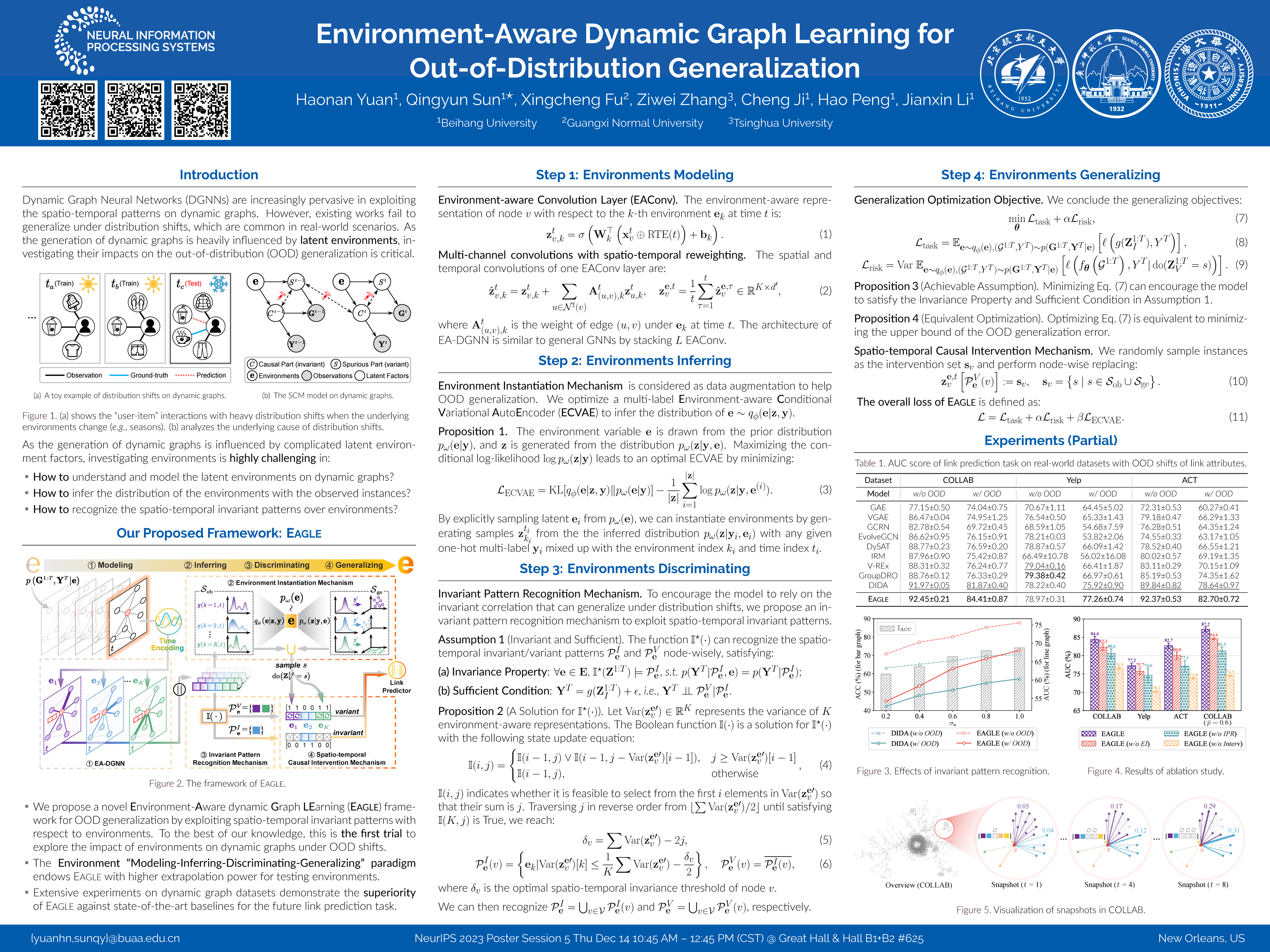
Dynamic graph neural networks (DGNNs) are increasingly pervasive in exploiting spatio-temporal patterns on dynamic graphs. However, existing works fail to generalize under distribution shifts, which are common in real-world scenarios. As the generation of dynamic graphs is heavily influenced by latent environments, investigating their impacts on the out-of-distribution (OOD) generalization is critical. However, it remains unexplored with the following two major challenges: (1) How to properly model and infer the complex environments on dynamic graphs with distribution shifts? (2) How to discover invariant patterns given inferred spatio-temporal environments? To solve these challenges, we propose a novel Environment-Aware dynamic Graph LEarning (EAGLE) framework for OOD generalization by modeling complex coupled environments and exploiting spatio-temporal invariant patterns. Specifically, we first design the environment-aware EA-DGNN to model environments by multi-channel environments disentangling. Then, we propose an environment instantiation mechanism for environment diversification with inferred distributions. Finally, we discriminate spatio-temporal invariant patterns for out-of-distribution prediction by the invariant pattern recognition mechanism and perform fine-grained causal interventions node-wisely with a mixture of instantiated environment samples. Experiments on real-world and synthetic dynamic graph datasets demonstrate the superiority of our method against state-of-the-art baselines under distribution shifts. To the best of our knowledge, we are the first to study OOD generalization on dynamic graphs from the environment learning perspective.