Poster
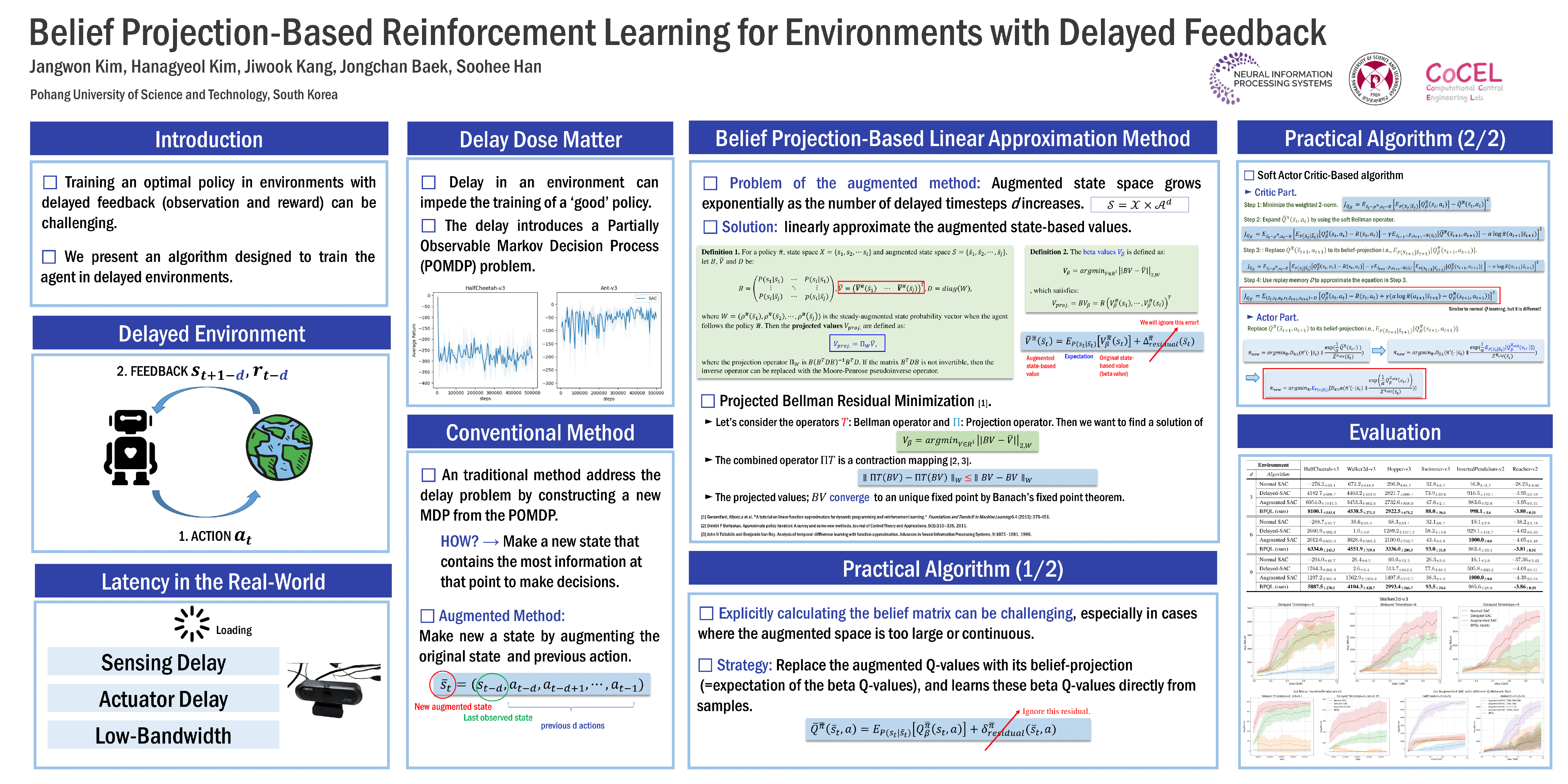
Belief Projection-Based Reinforcement Learning for Environments with Delayed Feedback
Jangwon Kim · Hangyeol Kim · Jiwook Kang · Jongchan Baek · Soohee Han
Great Hall & Hall B1+B2 (level 1) #1501
{kind=link}
We present a novel actor-critic algorithm for an environment with delayed feedback, which addresses the state-space explosion problem of conventional approaches. Conventional approaches use an augmented state constructed from the last observed state and actions executed since visiting the last observed state. Using the augmented state space, the correct Markov decision process for delayed environments can be constructed; however, this causes the state space to explode as the number of delayed timesteps increases, leading to slow convergence. Our proposed algorithm, called Belief-Projection-Based Q-learning (BPQL), addresses the state-space explosion problem by evaluating the values of the critic for which the input state size is equal to the original state-space size rather than that of the augmented one. We compare BPQL to traditional approaches in continuous control tasks and demonstrate that it significantly outperforms other algorithms in terms of asymptotic performance and sample efficiency. We also show that BPQL solves long-delayed environments, which conventional approaches are unable to do.