Spotlight Poster
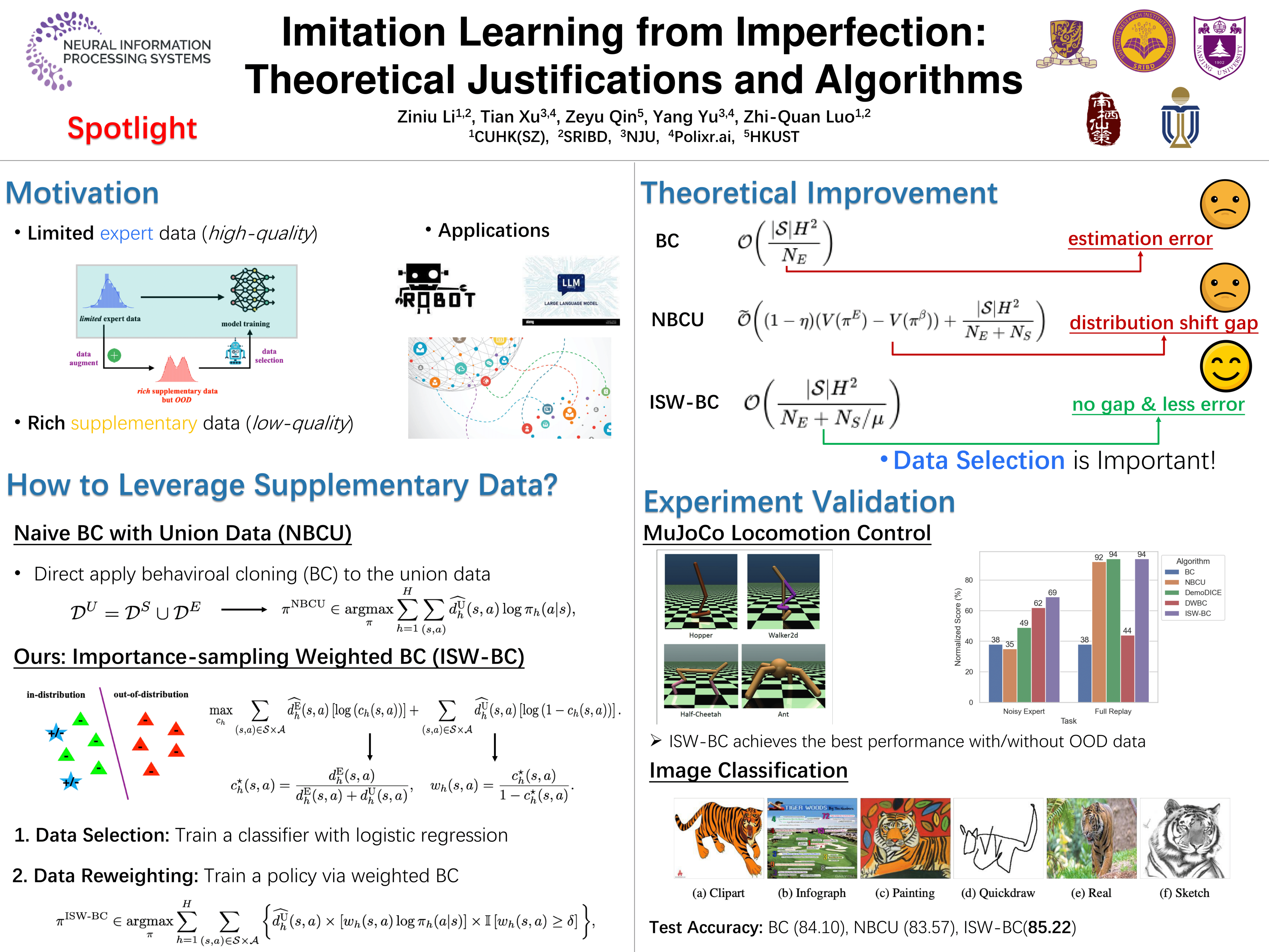
Imitation Learning from Imperfection: Theoretical Justifications and Algorithms
Ziniu Li · Tian Xu · Zeyu Qin · Yang Yu · Zhi-Quan Luo
Great Hall & Hall B1+B2 (level 1) #1306
{kind=link}
Imitation learning (IL) algorithms excel in acquiring high-quality policies from expert data for sequential decision-making tasks. But, their effectiveness is hampered when faced with limited expert data. To tackle this challenge, a novel framework called (offline) IL with supplementary data has been proposed, which enhances learning by incorporating an additional yet imperfect dataset obtained inexpensively from sub-optimal policies. Nonetheless, learning becomes challenging due to the potential inclusion of out-of-expert-distribution samples. In this work, we propose a mathematical formalization of this framework, uncovering its limitations. Our theoretical analysis reveals that a naive approach—applying the behavioral cloning (BC) algorithm concept to the combined set of expert and supplementary data—may fall short of vanilla BC, which solely relies on expert data. This deficiency arises due to the distribution shift between the two data sources. To address this issue, we propose a new importance-sampling-based technique for selecting data within the expert distribution. We prove that the proposed method eliminates the gap of the naive approach, highlighting its efficacy when handling imperfect data. Empirical studies demonstrate that our method outperforms previous state-of-the-art methods in tasks including robotic locomotion control, Atari video games, and image classification. Overall, our work underscores the potential of improving IL by leveraging diverse data sources through effective data selection.