Poster
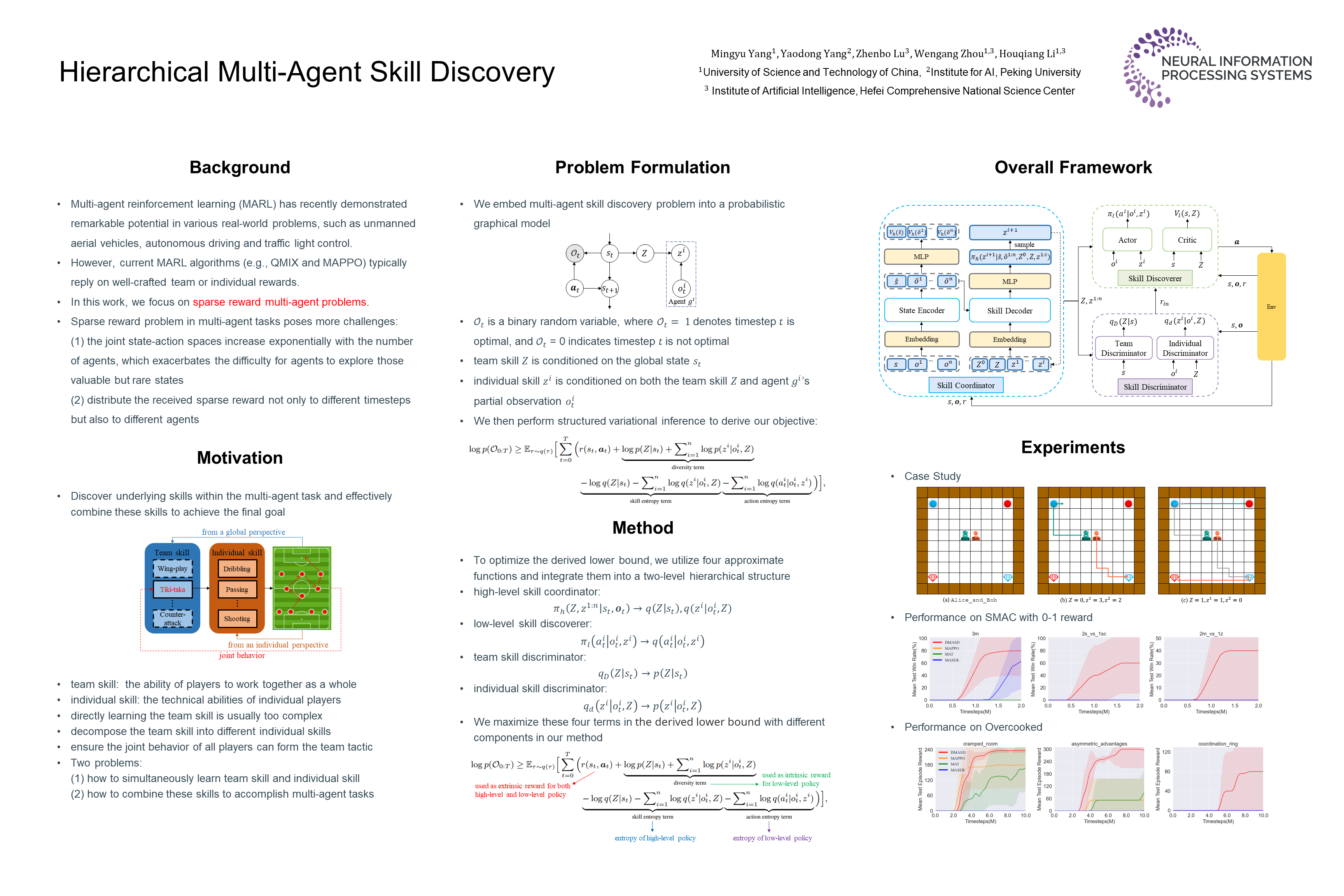
Hierarchical Multi-Agent Skill Discovery
Mingyu Yang · Yaodong Yang · Zhenbo Lu · Wengang Zhou · Houqiang Li
Great Hall & Hall B1+B2 (level 1) #1513
{kind=link}
Skill discovery has shown significant progress in unsupervised reinforcement learning. This approach enables the discovery of a wide range of skills without any extrinsic reward, which can be effectively combined to tackle complex tasks. However, such unsupervised skill learning has not been well applied to multi-agent reinforcement learning (MARL) due to two primary challenges. One is how to learn skills not only for the individual agents but also for the entire team, and the other is how to coordinate the skills of different agents to accomplish multi-agent tasks. To address these challenges, we present Hierarchical Multi-Agent Skill Discovery (HMASD), a two-level hierarchical algorithm for discovering both team and individual skills in MARL. The high-level policy employs a transformer structure to realize sequential skill assignment, while the low-level policy learns to discover valuable team and individual skills. We evaluate HMASD on sparse reward multi-agent benchmarks, and the results show that HMASD achieves significant performance improvements compared to strong MARL baselines.