Poster
in
Workshop: Mathematics of Modern Machine Learning (M3L)
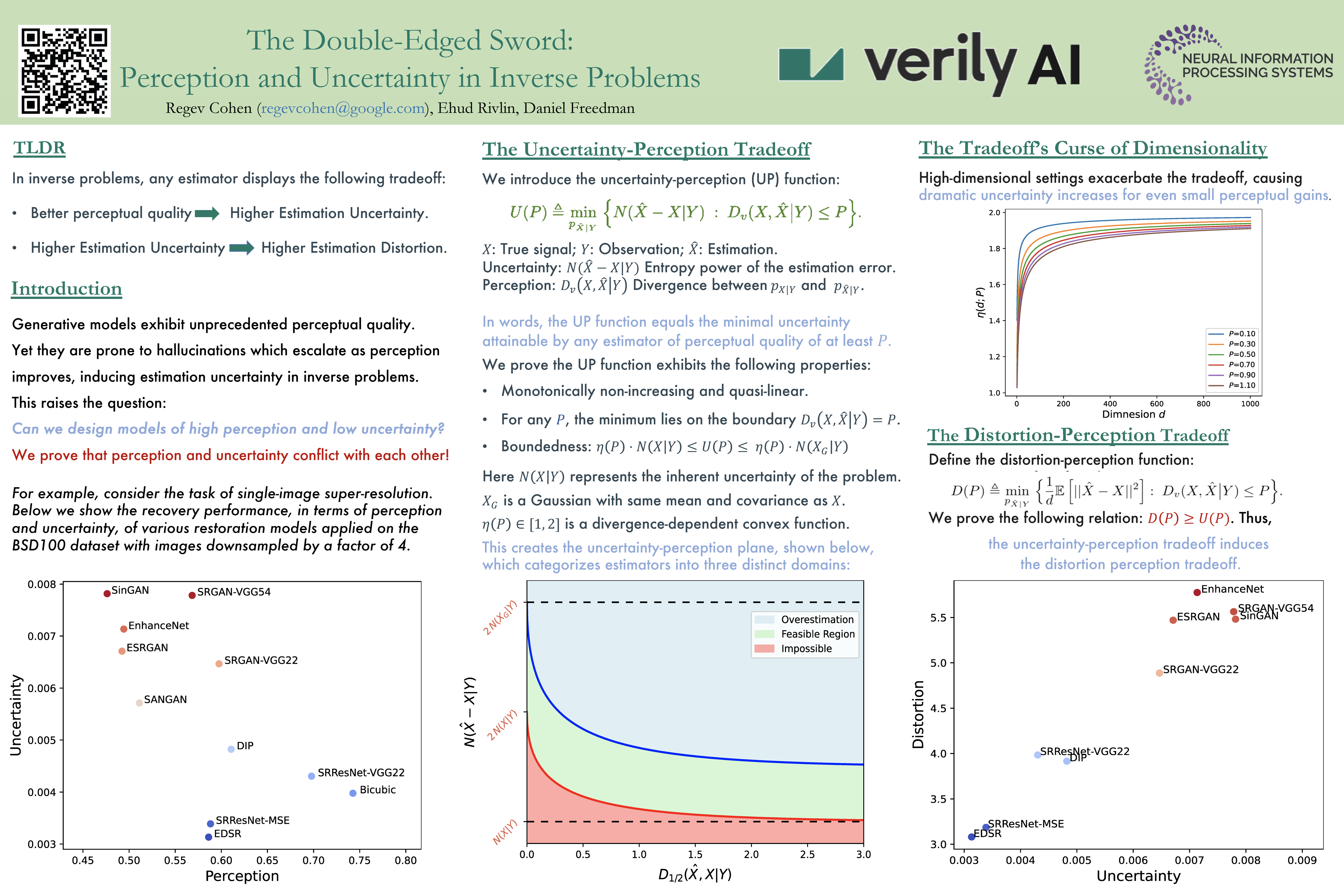
The Double-Edged Sword: Perception and Uncertainty in Inverse Problems
Regev Cohen · Ehud Rivlin · Daniel Freedman
{kind=link}
Inverse problems pose significant challenges due to their inherent ambiguity in mapping observed data back to its original state. While recent advances have yielded impressive results in restoring degraded data, attaining high perceptual quality comes at the cost of increased hallucinations. This paper investigates this phenomenon to reveal a fundamental tradeoff between perception and uncertainty in solving inverse problems. Using error entropy as a measure of uncertainty, we demonstrate that higher perceptual quality in restoration algorithms is accompanied by a surge in uncertainty. Leveraging Rényi divergence as a perception metric, we derive bounds for this tradeoff, allowing for categorization of different inverse methods based on their performance. Additionally, we connect estimation distortion with uncertainty, offering novel insights into the traditional perception-distortion tradeoff. Our work provides a rigorous framework for analyzing uncertainty in the context of solving inverse problems, highlighting its interplay with perception and distortion, while underscoring the limitations of current approaches to achieving both high perceptual quality and low uncertainty simultaneously.