Poster
in
Workshop: Touch Processing: a new Sensing Modality for AI
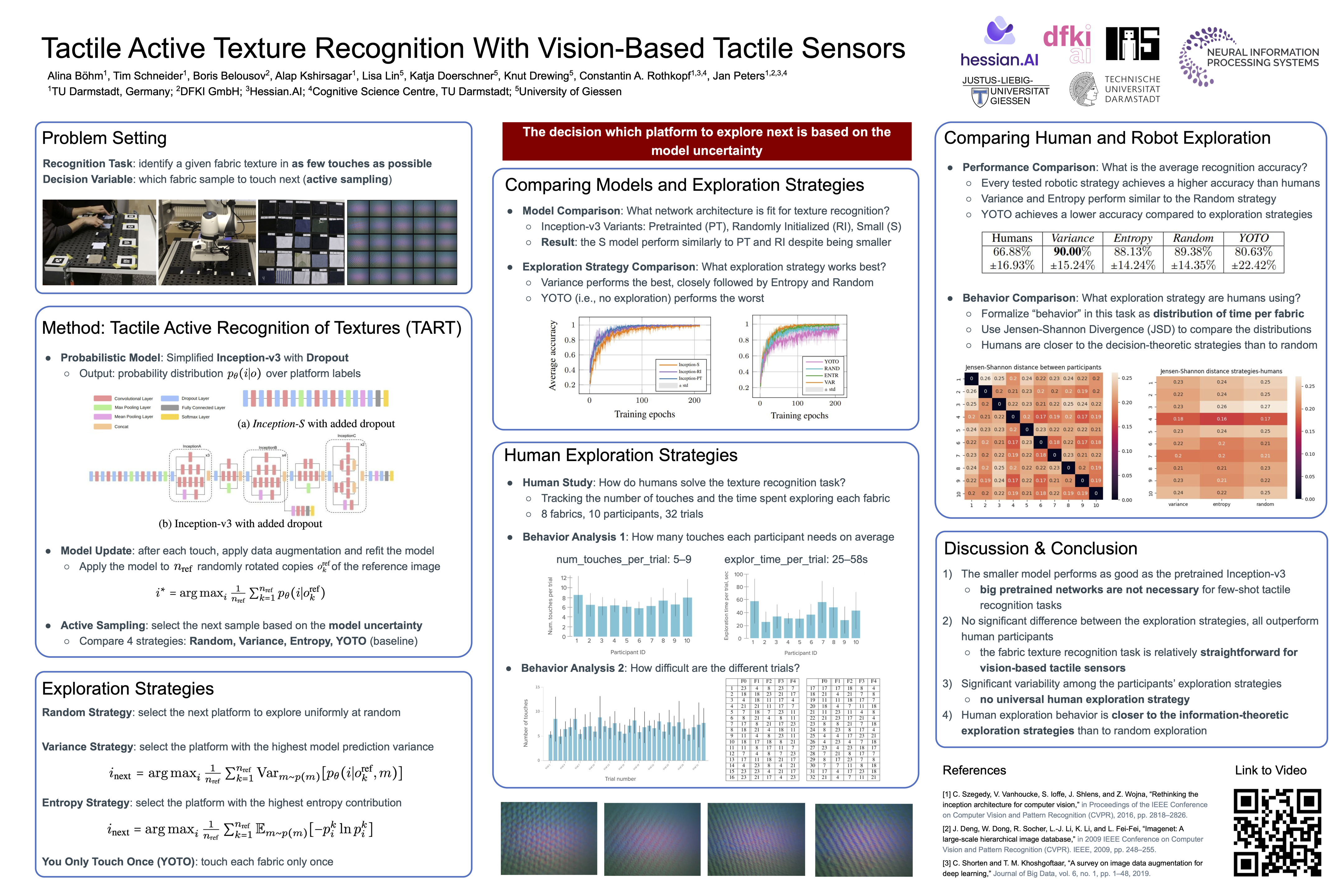
Tactile Active Texture Recognition With Vision-Based Tactile Sensors
Alina Boehm · Tim Schneider · Boris Belousov · Alap Kshirsagar · Lisa Lin · Katja Doerschner · Knut Drewing · Constantin Rothkopf · Jan Peters
{kind=link}
This paper investigates active sensing strategies that employ vision-based tactile sensors for robotic perception and classification of fabric textures. We formalize the active sampling problem in the context of tactile fabric recognition and provide an implementation of information-theoretic exploration strategies based on minimizing predictive entropy and variance of probabilistic neural network classifiers. By evaluating our method on a real robotic system, we find that the choice of the active exploration strategy has a relatively minor influence on the recognition accuracy as long as the objects are touched more than once. In a comparison study, while humans achieve 66.9% recognition accuracy, our best approach reaches 90.0%, showing that vision-based tactile sensors are highly effective for fabric recognition.