Poster
in
Workshop: Temporal Graph Learning Workshop @ NeurIPS 2023
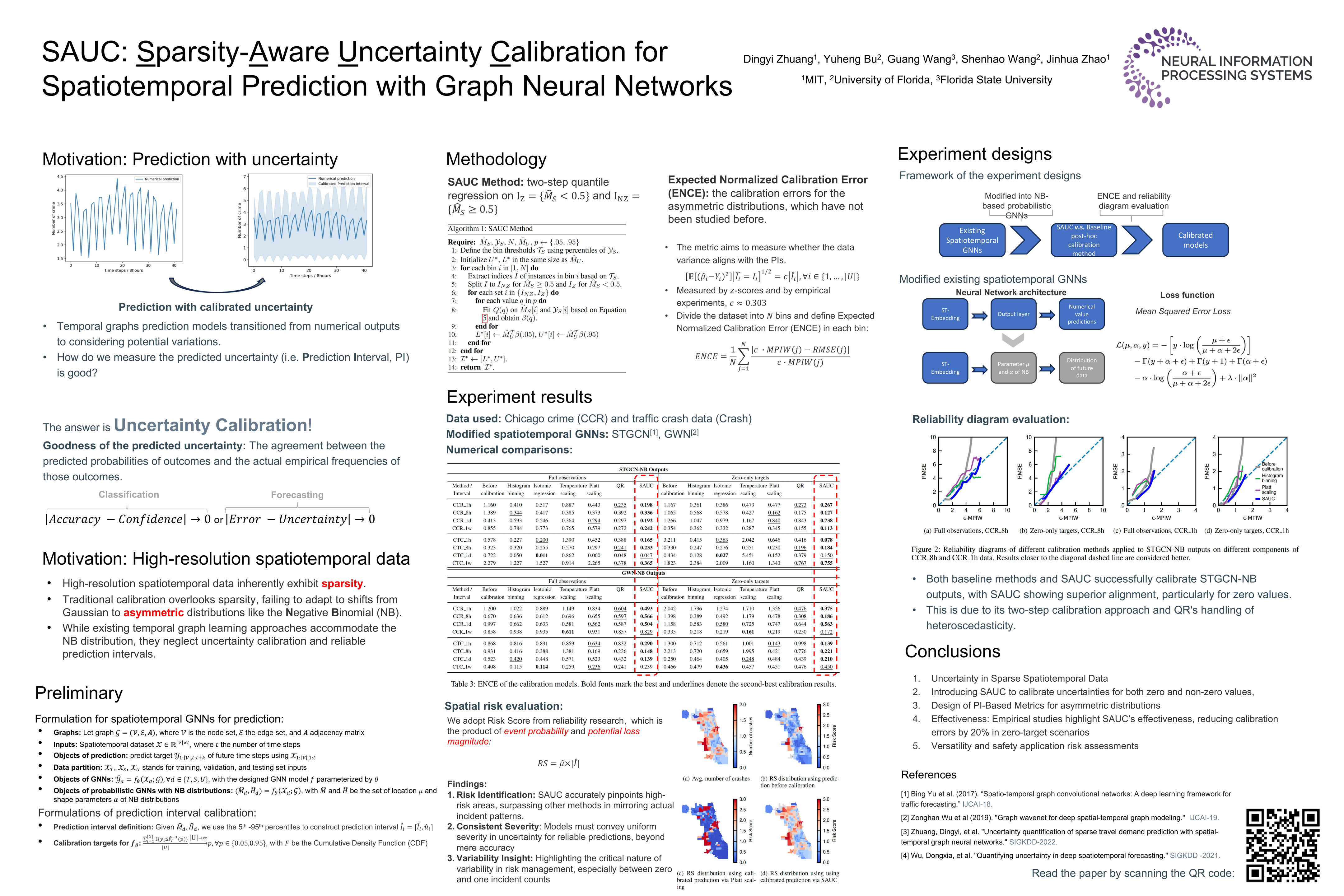
SAUC: Sparsity-Aware Uncertainty Calibration for Spatiotemporal Prediction with Graph Neural Networks
Dingyi Zhuang · Yuheng Bu · Guang Wang · Shenhao Wang · Jinhua Zhao
{kind=link}
Quantifying uncertainty is essential for achieving robust and reliable predictions. However, existing spatiotemporal models predominantly predict deterministic values, often overlooking the uncertainty in their forecasts. Particularly, high-resolution spatiotemporal datasets are rich in zeros, posing further challenges in quantifying the uncertainty of such sparse and asymmetrically distributed data. This paper introduces a novel post-hoc Sparsity-aware Uncertainty Calibration (SAUC) method, calibrating the uncertainty in both zero and non-zero values. We modify the state-of-the-art deterministic spatiotemporal Graph Neural Networks (GNNs) to probabilistic ones as the synthetic models in the pre-calibration phase. Applied to two real-world spatiotemporal datasets of varied granularities, extensive experiments demonstrate SAUC's capacity to adeptly calibrate uncertainty, effectively fitting the variance of zero values and exhibiting robust generalizability. Specifically, our empirical experiments show a 20\% of reduction in calibration errors in zero entries on the sparse traffic accident and urban crime prediction. The results validate our method's theoretical and empirical values, demonstrating calibrated results that provide reliable safety guidance, thereby bridging a significant gap in uncertainty quantification (UQ) for sparse spatiotemporal data.