Poster
in
Workshop: NeurIPS 2023 Workshop on Diffusion Models
Denoising Heat-inspired Diffusion with Insulators for Collision Free Motion Planning
Junwoo Chang · Hyunwoo Ryu · Jiwoo Kim · Soochul Yoo · Joohwan Seo · Nikhil Potu Surya Prakash · Jongeun Choi · Roberto Horowitz
{kind=link}
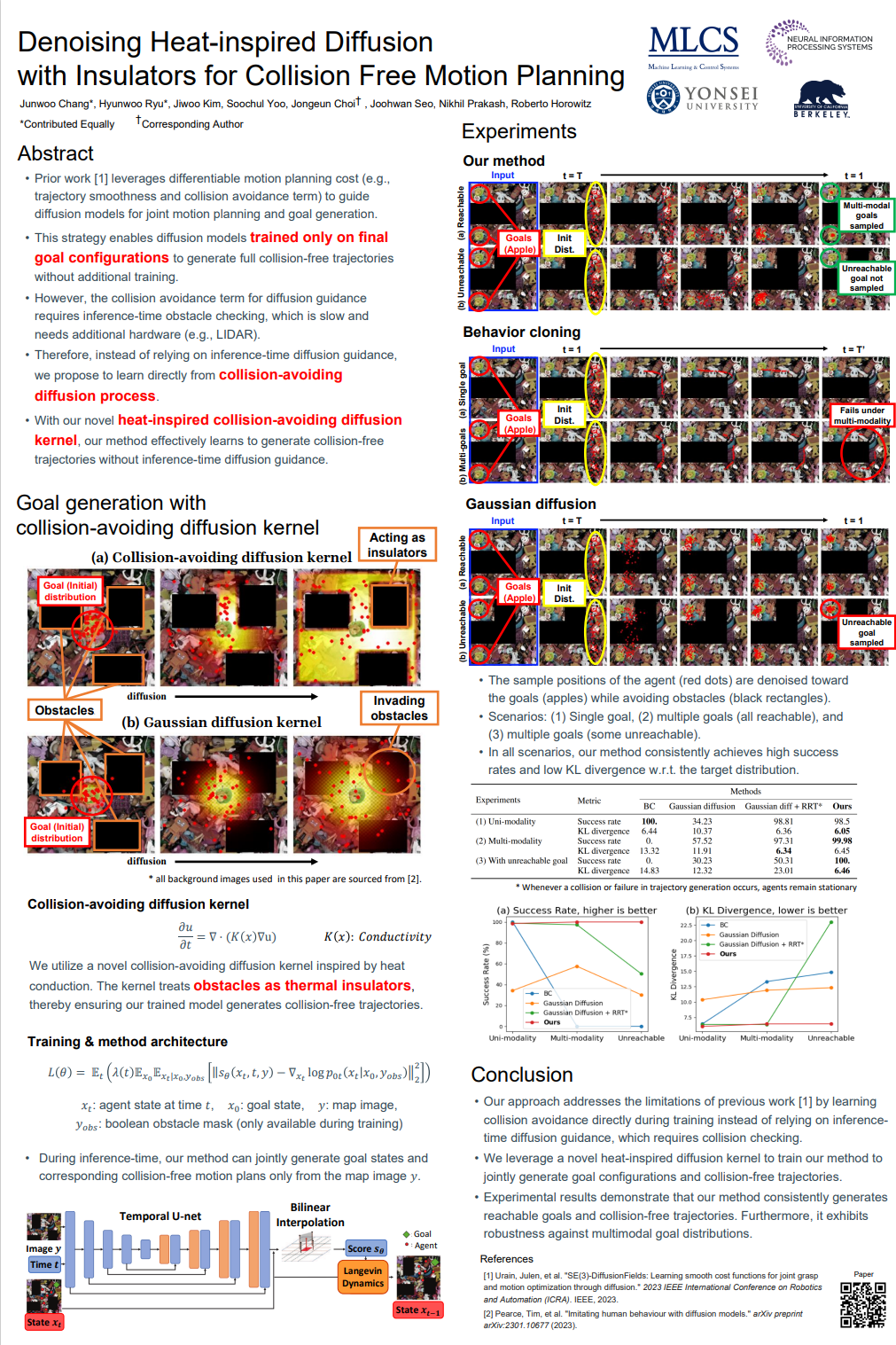
Diffusion models have risen as a powerful tool in robotics due to their flexibility and multi-modality. While some of these methods effectively address complex problems, they often depend heavily on inference-time obstacle detection and require additional equipment. Addressing these challenges, we present a method that, during inference time, simultaneously generates only reachable goals and plans motions that avoid obstacles, all from a single visual input. Central to our approach is the novel use of a collision-avoiding diffusion kernel for training. Through evaluations against behavior-cloning and classical diffusion models, our framework has proven its robustness. It is particularly effective in multi-modal environments, navigating toward goals and avoiding unreachable ones blocked by obstacles, while ensuring collision avoidance.