
We introduce Habitat 2.0 (H2.0), a simulation platform for training virtual robots in interactive 3D environments and complex physics-enabled scenarios. We make comprehensive contributions to all levels of the embodied AI stack – data, simulation, and benchmark tasks. Specifically, we present: (i) ReplicaCAD: an artist-authored, annotated, reconfigurable 3D dataset of apartments (matching real spaces) with articulated objects (e.g. cabinets and drawers that can open/close); (ii) H2.0: a high-performance physics-enabled 3D simulator with speeds exceeding 25,000 simulation steps per second (850x real-time) on an 8-GPU node, representing 100x speed-ups over prior work; and, (iii) Home Assistant Benchmark (HAB): a suite of common tasks for assistive robots (tidy the house, stock groceries, set the table) that test a range of mobile manipulation capabilities. These large-scale engineering contributions allow us to systematically compare deep reinforcement learning (RL) at scale and classical sense-plan-act (SPA) pipelines in long-horizon structured tasks, with an emphasis on generalization to new objects, receptacles, and layouts. We find that (1) flat RL policies struggle on HAB compared to hierarchical ones; (2) a hierarchy with independent skills suffers from ‘hand-off problems’, and (3) SPA pipelines are more brittle than RL policies.
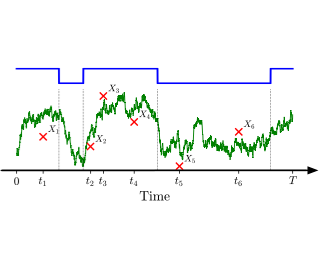
Switching dynamical systems provide a powerful, interpretable modeling framework for inference in time-series data in, e.g., the natural sciences or engineering applications. Since many areas, such as biology or discrete-event systems, are naturally described in continuous time, we present a model based on a Markov jump process modulating a subordinated diffusion process. We provide the exact evolution equations for the prior and posterior marginal densities, the direct solutions of which are however computationally intractable. Therefore, we develop a new continuous-time variational inference algorithm, combining a Gaussian process approximation on the diffusion level with posterior inference for Markov jump processes. By minimizing the path-wise Kullback-Leibler divergence we obtain (i) Bayesian latent state estimates for arbitrary points on the real axis and (ii) point estimates of unknown system parameters, utilizing variational expectation maximization. We extensively evaluate our algorithm under the model assumption and for real-world examples.
A backdoor data poisoning attack is an adversarial attack wherein the attacker injects several watermarked, mislabeled training examples into a training set. The watermark does not impact the test-time performance of the model on typical data; however, the model reliably errs on watermarked examples.To gain a better foundational understanding of backdoor data poisoning attacks, we present a formal theoretical framework within which one can discuss backdoor data poisoning attacks for classification problems. We then use this to analyze important statistical and computational issues surrounding these attacks.On the statistical front, we identify a parameter we call the memorization capacity that captures the intrinsic vulnerability of a learning problem to a backdoor attack. This allows us to argue about the robustness of several natural learning problems to backdoor attacks. Our results favoring the attacker involve presenting explicit constructions of backdoor attacks, and our robustness results show that some natural problem settings cannot yield successful backdoor attacks.From a computational standpoint, we show that under certain assumptions, adversarial training can detect the presence of backdoors in a training set. We then show that under similar assumptions, two closely related problems we call backdoor filtering and robust generalization are nearly equivalent. This implies that it …
Learning efficiently from small amounts of data has long been the focus of model-based reinforcement learning, both for the online case when interacting with the environment, and the offline case when learning from a fixed dataset. However, to date no single unified algorithm could demonstrate state-of-the-art results for both settings.In this work, we describe the Reanalyse algorithm, which uses model-based policy and value improvement operators to compute improved training targets for existing data points, allowing for efficient learning at data budgets varying by several orders of magnitude. We further show that Reanalyse can also be used to learn completely without environment interactions, as in the case of Offline Reinforcement Learning (Offline RL). Combining Reanalyse with the MuZero algorithm, we introduce MuZero Unplugged, a single unified algorithm for any data budget, including Offline RL. In contrast to previous work, our algorithm requires no special adaptations for the off-policy or Offline RL settings. MuZero Unplugged sets new state-of-the-art results for Atari in the standard 200 million frame online setting as well as in the RL Unplugged Offline RL benchmark.
Vision transformers (ViT) have demonstrated impressive performance across numerous machine vision tasks. These models are based on multi-head self-attention mechanisms that can flexibly attend to a sequence of image patches to encode contextual cues. An important question is how such flexibility (in attending image-wide context conditioned on a given patch) can facilitate handling nuisances in natural images e.g., severe occlusions, domain shifts, spatial permutations, adversarial and natural perturbations. We systematically study this question via an extensive set of experiments encompassing three ViT families and provide comparisons with a high-performing convolutional neural network (CNN). We show and analyze the following intriguing properties of ViT: (a)Transformers are highly robust to severe occlusions, perturbations and domain shifts, e.g., retain as high as 60% top-1 accuracy on ImageNet even after randomly occluding 80% of the image content. (b)The robustness towards occlusions is not due to texture bias, instead we show that ViTs are significantly less biased towards local textures, compared to CNNs. When properly trained to encode shape-based features, ViTs demonstrate shape recognition capability comparable to that of human visual system, previously unmatched in the literature. (c)Using ViTs to encode shape representation leads to an interesting consequence of accurate semantic segmentation without pixel-level supervision. …
Finding the minimal structural assumptions that empower sample-efficient learning is one of the most important research directions in Reinforcement Learning (RL). This paper advances our understanding of this fundamental question by introducing a new complexity measure—Bellman Eluder (BE) dimension. We show that the family of RL problems of low BE dimension is remarkably rich, which subsumes a vast majority of existing tractable RL problems including but not limited to tabular MDPs, linear MDPs, reactive POMDPs, low Bellman rank problems as well as low Eluder dimension problems. This paper further designs a new optimization-based algorithm— GOLF, and reanalyzes a hypothesis elimination-based algorithm—OLIVE (proposed in Jiang et al. (2017)). We prove that both algorithms learn the near-optimal policies of low BE dimension problems in a number of samples that is polynomial in all relevant parameters, but independent of the size of state-action space. Our regret and sample complexity results match or improve the best existing results for several well-known subclasses of low BE dimension problems.
Before the deep learning revolution, many perception algorithms were based on runtime optimization in conjunction with a strong prior/regularization penalty. A prime example of this in computer vision is optical and scene flow. Supervised learning has largely displaced the need for explicit regularization. Instead, they rely on large amounts of labeled data to capture prior statistics, which are not always readily available for many problems. Although optimization is employed to learn the neural network, at runtime, the weights of this network are frozen. As a result, these learning solutions are domain-specific and do not generalize well to other statistically different scenarios. This paper revisits the scene flow problem that relies predominantly on runtime optimization and strong regularization. A central innovation here is the inclusion of a neural scene flow prior, which utilizes the architecture of neural networks as a new type of implicit regularizer. Unlike learning-based scene flow methods, optimization occurs at runtime, and our approach needs no offline datasets---making it ideal for deployment in new environments such as autonomous driving. We show that an architecture based exclusively on multilayer perceptrons (MLPs) can be used as a scene flow prior. Our method attains competitive---if not better---results on scene flow benchmarks. …

Importance Sampling (IS) is a widely used building block for a large variety of off-policy estimation and learning algorithms. However, empirical and theoretical studies have progressively shown that vanilla IS leads to poor estimations whenever the behavioral and target policies are too dissimilar. In this paper, we analyze the theoretical properties of the IS estimator by deriving a novel anticoncentration bound that formalizes the intuition behind its undesired behavior. Then, we propose a new class of IS transformations, based on the notion of power mean. To the best of our knowledge, the resulting estimator is the first to achieve, under certain conditions, two key properties: (i) it displays a subgaussian concentration rate; (ii) it preserves the differentiability in the target distribution. Finally, we provide numerical simulations on both synthetic examples and contextual bandits, in comparison with off-policy evaluation and learning baselines.
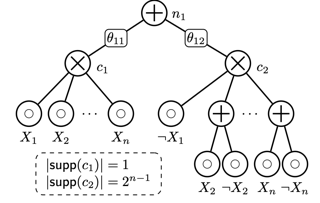
Probabilistic Circuits (PCs) are a promising avenue for probabilistic modeling. They combine advantages of probabilistic graphical models (PGMs) with those of neural networks (NNs). Crucially, however, they are tractable probabilistic models, supporting efficient and exact computation of many probabilistic inference queries, such as marginals and MAP. Further, since PCs are structured computation graphs, they can take advantage of deep-learning-style parameter updates, which greatly improves their scalability. However, this innovation also makes PCs prone to overfitting, which has been observed in many standard benchmarks. Despite the existence of abundant regularization techniques for both PGMs and NNs, they are not effective enough when applied to PCs. Instead, we re-think regularization for PCs and propose two intuitive techniques, data softening and entropy regularization, that both take advantage of PCs' tractability and still have an efficient implementation as a computation graph. Specifically, data softening provides a principled way to add uncertainty in datasets in closed form, which implicitly regularizes PC parameters. To learn parameters from a softened dataset, PCs only need linear time by virtue of their tractability. In entropy regularization, the exact entropy of the distribution encoded by a PC can be regularized directly, which is again infeasible for most other density estimation …
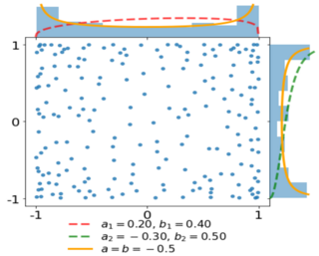
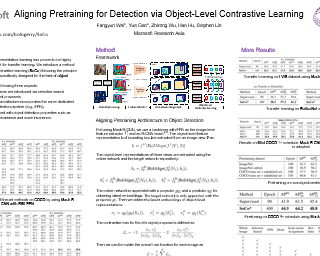
Image-level contrastive representation learning has proven to be highly effective as a generic model for transfer learning. Such generality for transfer learning, however, sacrifices specificity if we are interested in a certain downstream task. We argue that this could be sub-optimal and thus advocate a design principle which encourages alignment between the self-supervised pretext task and the downstream task. In this paper, we follow this principle with a pretraining method specifically designed for the task of object detection. We attain alignment in the following three aspects: 1) object-level representations are introduced via selective search bounding boxes as object proposals; 2) the pretraining network architecture incorporates the same dedicated modules used in the detection pipeline (e.g. FPN); 3) the pretraining is equipped with object detection properties such as object-level translation invariance and scale invariance. Our method, called Selective Object COntrastive learning (SoCo), achieves state-of-the-art results for transfer performance on COCO detection using a Mask R-CNN framework. Code is available at https://github.com/hologerry/SoCo.

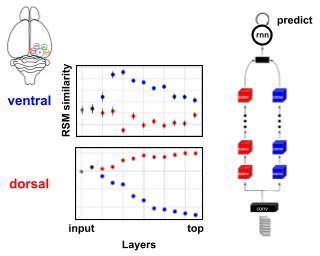
The visual system of mammals is comprised of parallel, hierarchical specialized pathways. Different pathways are specialized in so far as they use representations that are more suitable for supporting specific downstream behaviours. In particular, the clearest example is the specialization of the ventral ("what") and dorsal ("where") pathways of the visual cortex. These two pathways support behaviours related to visual recognition and movement, respectively. To-date, deep neural networks have mostly been used as models of the ventral, recognition pathway. However, it is unknown whether both pathways can be modelled with a single deep ANN. Here, we ask whether a single model with a single loss function can capture the properties of both the ventral and the dorsal pathways. We explore this question using data from mice, who like other mammals, have specialized pathways that appear to support recognition and movement behaviours. We show that when we train a deep neural network architecture with two parallel pathways using a self-supervised predictive loss function, we can outperform other models in fitting mouse visual cortex. Moreover, we can model both the dorsal and ventral pathways. These results demonstrate that a self-supervised predictive learning approach applied to parallel pathway architectures can account for some …
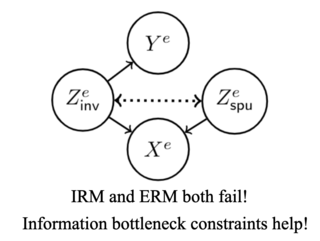
The invariance principle from causality is at the heart of notable approaches such as invariant risk minimization (IRM) that seek to address out-of-distribution (OOD) generalization failures. Despite the promising theory, invariance principle-based approaches fail in common classification tasks, where invariant (causal) features capture all the information about the label. Are these failures due to the methods failing to capture the invariance? Or is the invariance principle itself insufficient? To answer these questions, we revisit the fundamental assumptions in linear regression tasks, where invariance-based approaches were shown to provably generalize OOD. In contrast to the linear regression tasks, we show that for linear classification tasks we need much stronger restrictions on the distribution shifts, or otherwise OOD generalization is impossible. Furthermore, even with appropriate restrictions on distribution shifts in place, we show that the invariance principle alone is insufficient. We prove that a form of the information bottleneck constraint along with invariance helps address the key failures when invariant features capture all the information about the label and also retains the existing success when they do not. We propose an approach that incorporates both of these principles and demonstrate its effectiveness in several experiments.
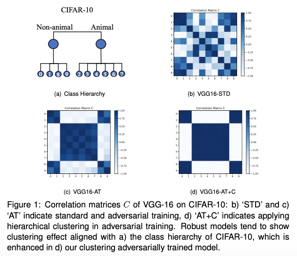
Adversarial robustness has received increasing attention along with the study of adversarial examples. So far, existing works show that robust models not only obtain robustness against various adversarial attacks but also boost the performance in some downstream tasks. However, the underlying mechanism of adversarial robustness is still not clear. In this paper, we interpret adversarial robustness from the perspective of linear components, and find that there exist some statistical properties for comprehensively robust models. Specifically, robust models show obvious hierarchical clustering effect on their linearized sub-networks, when removing or replacing all non-linear components (e.g., batch normalization, maximum pooling, or activation layers). Based on these observations, we propose a novel understanding of adversarial robustness and apply it on more tasks including domain adaption and robustness boosting. Experimental evaluations demonstrate the rationality and superiority of our proposed clustering strategy. Our code is available at https://github.com/bymavis/AdvWeightNeurIPS2021.
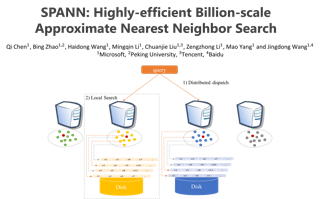
The in-memory algorithms for approximate nearest neighbor search (ANNS) have achieved great success for fast high-recall search, but are extremely expensive when handling very large scale database. Thus, there is an increasing request for the hybrid ANNS solutions with small memory and inexpensive solid-state drive (SSD). In this paper, we present a simple but efficient memory-disk hybrid indexing and search system, named SPANN, that follows the inverted index methodology. It stores the centroid points of the posting lists in the memory and the large posting lists in the disk. We guarantee both disk-access efficiency (low latency) and high recall by effectively reducing the disk-access number and retrieving high-quality posting lists. In the index-building stage, we adopt a hierarchical balanced clustering algorithm to balance the length of posting lists and augment the posting list by adding the points in the closure of the corresponding clusters. In the search stage, we use a query-aware scheme to dynamically prune the access of unnecessary posting lists. Experiment results demonstrate that SPANN is 2X faster than the state-of-the-art ANNS solution DiskANN to reach the same recall quality 90% with same memory cost in three billion-scale datasets. It can reach 90% recall@1 and recall@10 in just …
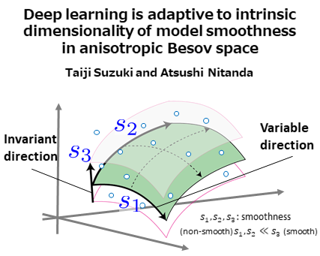
Deep learning has exhibited superior performance for various tasks, especially for high-dimensional datasets, such as images. To understand this property, we investigate the approximation and estimation ability of deep learning on {\it anisotropic Besov spaces}.The anisotropic Besov space is characterized by direction-dependent smoothness and includes several function classes that have been investigated thus far.We demonstrate that the approximation error and estimation error of deep learning only depend on the average value of the smoothness parameters in all directions. Consequently, the curse of dimensionality can be avoided if the smoothness of the target function is highly anisotropic.Unlike existing studies, our analysis does not require a low-dimensional structure of the input data.We also investigate the minimax optimality of deep learning and compare its performance with that of the kernel method (more generally, linear estimators).The results show that deep learning has better dependence on the input dimensionality if the target function possesses anisotropic smoothness, and it achieves an adaptive rate for functions with spatially inhomogeneous smoothness.
We provide improved gap-dependent regret bounds for reinforcement learning in finite episodic Markov decision processes. Compared to prior work, our bounds depend on alternative definitions of gaps. These definitions are based on the insight that, in order to achieve a favorable regret, an algorithm does not need to learn how to behave optimally in states that are not reached by an optimal policy. We prove tighter upper regret bounds for optimistic algorithms and accompany them with new information-theoretic lower bounds for a large class of MDPs. Our results show that optimistic algorithms can not achieve the information-theoretic lower bounds even in deterministic MDPs unless there is a unique optimal policy.
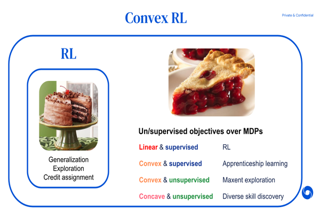
Maximising a cumulative reward function that is Markov and stationary, i.e., defined over state-action pairs and independent of time, is sufficient to capture many kinds of goals in a Markov decision process (MDP). However, not all goals can be captured in this manner. In this paper we study convex MDPs in which goals are expressed as convex functions of the stationary distribution and show that they cannot be formulated using stationary reward functions. Convex MDPs generalize the standard reinforcement learning (RL) problem formulation to a larger framework that includes many supervised and unsupervised RL problems, such as apprenticeship learning, constrained MDPs, and so-called pure exploration'. Our approach is to reformulate the convex MDP problem as a min-max game involving policy and cost (negative reward)players', using Fenchel duality. We propose a meta-algorithm for solving this problem and show that it unifies many existing algorithms in the literature.
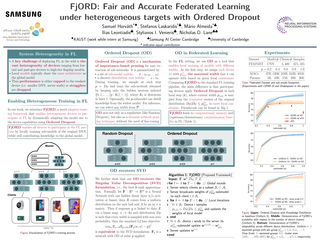
Federated Learning (FL) has been gaining significant traction across different ML tasks, ranging from vision to keyboard predictions. In large-scale deployments, client heterogeneity is a fact and constitutes a primary problem for fairness, training performance and accuracy. Although significant efforts have been made into tackling statistical data heterogeneity, the diversity in the processing capabilities and network bandwidth of clients, termed system heterogeneity, has remained largely unexplored. Current solutions either disregard a large portion of available devices or set a uniform limit on the model's capacity, restricted by the least capable participants.In this work, we introduce Ordered Dropout, a mechanism that achieves an ordered, nested representation of knowledge in Neural Networks and enables the extraction of lower footprint submodels without the need for retraining. We further show that for linear maps our Ordered Dropout is equivalent to SVD. We employ this technique, along with a self-distillation methodology, in the realm of FL in a framework called FjORD. FjORD alleviates the problem of client system heterogeneity by tailoring the model width to the client's capabilities. Extensive evaluation on both CNNs and RNNs across diverse modalities shows that FjORD consistently leads to significant performance gains over state-of-the-art baselines while maintaining its nested structure.
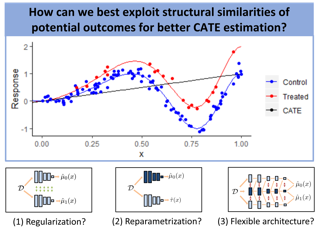
We investigate how to exploit structural similarities of an individual's potential outcomes (POs) under different treatments to obtain better estimates of conditional average treatment effects in finite samples. Especially when it is unknown whether a treatment has an effect at all, it is natural to hypothesize that the POs are similar -- yet, some existing strategies for treatment effect estimation employ regularization schemes that implicitly encourage heterogeneity even when it does not exist and fail to fully make use of shared structure. In this paper, we investigate and compare three end-to-end learning strategies to overcome this problem -- based on regularization, reparametrization and a flexible multi-task architecture -- each encoding inductive bias favoring shared behavior across POs. To build understanding of their relative strengths, we implement all strategies using neural networks and conduct a wide range of semi-synthetic experiments. We observe that all three approaches can lead to substantial improvements upon numerous baselines and gain insight into performance differences across various experimental settings.
Deep neural networks (DNNs) have shown to perform very well on large scale object recognition problems and lead to widespread use for real-world applications, including situations where DNN are implemented as “black boxes”. A promising approach to secure their use is to accept decisions that are likely to be correct while discarding the others. In this work, we propose DOCTOR, a simple method that aims to identify whether the prediction of a DNN classifier should (or should not) be trusted so that, consequently, it would be possible to accept it or to reject it. Two scenarios are investigated: Totally Black Box (TBB) where only the soft-predictions are available and Partially Black Box (PBB) where gradient-propagation to perform input pre-processing is allowed. Empirically, we show that DOCTOR outperforms all state-of-the-art methods on various well-known images and sentiment analysis datasets. In particular, we observe a reduction of up to 4% of the false rejection rate (FRR) in the PBB scenario. DOCTOR can be applied to any pre-trained model, it does not require prior information about the underlying dataset and is as simple as the simplest available methods in the literature.
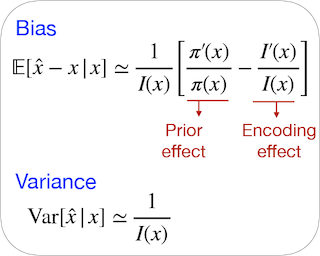
Perception, in theoretical neuroscience, has been modeled as the encoding of external stimuli into internal signals, which are then decoded. The Bayesian mean is an important decoder, as it is optimal for purposes of both estimation and discrimination. We present widely-applicable approximations to the bias and to the variance of the Bayesian mean, obtained under the minimal and biologically-relevant assumption that the encoding results from a series of independent, though not necessarily identically-distributed, signals. Simulations substantiate the accuracy of our approximations in the small-noise regime. The bias of the Bayesian mean comprises two components: one driven by the prior, and one driven by the precision of the encoding. If the encoding is 'efficient', the two components have opposite effects; their relative strengths are determined by the objective that the encoding optimizes. The experimental literature on perception reports both 'Bayesian' biases directed towards prior expectations, and opposite, 'anti-Bayesian' biases. We show that different tasks are indeed predicted to yield such contradictory biases, under a consistently-optimal encoding-decoding model. Moreover, we recover Wei and Stocker's "law of human perception", a relation between the bias of the Bayesian mean and the derivative of its variance, and show how the coefficient of proportionality in this …
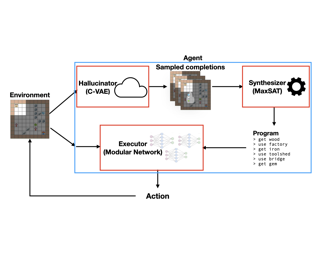
A key challenge for reinforcement learning is solving long-horizon planning problems. Recent work has leveraged programs to guide reinforcement learning in these settings. However, these approaches impose a high manual burden on the user since they must provide a guiding program for every new task. Partially observed environments further complicate the programming task because the program must implement a strategy that correctly, and ideally optimally, handles every possible configuration of the hidden regions of the environment. We propose a new approach, model predictive program synthesis (MPPS), that uses program synthesis to automatically generate the guiding programs. It trains a generative model to predict the unobserved portions of the world, and then synthesizes a program based on samples from this model in a way that is robust to its uncertainty. In our experiments, we show that our approach significantly outperforms non-program-guided approaches on a set of challenging benchmarks, including a 2D Minecraft-inspired environment where the agent must complete a complex sequence of subtasks to achieve its goal, and achieves a similar performance as using handcrafted programs to guide the agent. Our results demonstrate that our approach can obtain the benefits of program-guided reinforcement learning without requiring the user to provide a …

To understand the relationship between behavior and neural activity, experiments in neuroscience often include an animal performing a repeated behavior such as a motor task. Recent progress in computer vision and deep learning has shown great potential in the automated analysis of behavior by leveraging large and high-quality video datasets. In this paper, we design Disentangled Behavior Embedding (DBE) to learn robust behavioral embeddings from unlabeled, multi-view, high-resolution behavioral videos across different animals and multiple sessions. We further combine DBE with a stochastic temporal model to propose Variational Disentangled Behavior Embedding (VDBE), an end-to-end approach that learns meaningful discrete behavior representations and generates interpretable behavioral videos. Our models learn consistent behavior representations by explicitly disentangling the dynamic behavioral factors (pose) from time-invariant, non-behavioral nuisance factors (context) in a deep autoencoder, and exploit the temporal structures of pose dynamics. Compared to competing approaches, DBE and VDBE enjoy superior performance on downstream tasks such as fine-grained behavioral motif generation and behavior decoding.
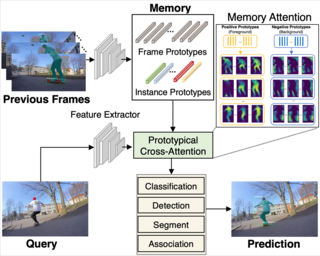
Multiple object tracking and segmentation requires detecting, tracking, and segmenting objects belonging to a set of given classes. Most approaches only exploit the temporal dimension to address the association problem, while relying on single frame predictions for the segmentation mask itself. We propose Prototypical Cross-Attention Network (PCAN), capable of leveraging rich spatio-temporal information for online multiple object tracking and segmentation. PCAN first distills a space-time memory into a set of prototypes and then employs cross-attention to retrieve rich information from the past frames. To segment each object, PCAN adopts a prototypical appearance module to learn a set of contrastive foreground and background prototypes, which are then propagated over time. Extensive experiments demonstrate that PCAN outperforms current video instance tracking and segmentation competition winners on both Youtube-VIS and BDD100K datasets, and shows efficacy to both one-stage and two-stage segmentation frameworks. Code and video resources are available at http://vis.xyz/pub/pcan.
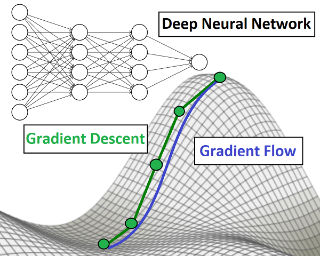
Existing analyses of optimization in deep learning are either continuous, focusing on (variants of) gradient flow, or discrete, directly treating (variants of) gradient descent. Gradient flow is amenable to theoretical analysis, but is stylized and disregards computational efficiency. The extent to which it represents gradient descent is an open question in the theory of deep learning. The current paper studies this question. Viewing gradient descent as an approximate numerical solution to the initial value problem of gradient flow, we find that the degree of approximation depends on the curvature around the gradient flow trajectory. We then show that over deep neural networks with homogeneous activations, gradient flow trajectories enjoy favorable curvature, suggesting they are well approximated by gradient descent. This finding allows us to translate an analysis of gradient flow over deep linear neural networks into a guarantee that gradient descent efficiently converges to global minimum almost surely under random initialization. Experiments suggest that over simple deep neural networks, gradient descent with conventional step size is indeed close to gradient flow. We hypothesize that the theory of gradient flows will unravel mysteries behind deep learning.
The theory of spectral filtering is a remarkable tool to understand the statistical properties of learning with kernels. For least squares, it allows to derive various regularization schemes that yield faster convergence rates of the excess risk than with Tikhonov regularization. This is typically achieved by leveraging classical assumptions called source and capacity conditions, which characterize the difficulty of the learning task. In order to understand estimators derived from other loss functions, Marteau-Ferey et al. have extended the theory of Tikhonov regularization to generalized self concordant loss functions (GSC), which contain, e.g., the logistic loss. In this paper, we go a step further and show that fast and optimal rates can be achieved for GSC by using the iterated Tikhonov regularization scheme, which is intrinsically related to the proximal point method in optimization, and overcomes the limitation of the classical Tikhonov regularization.

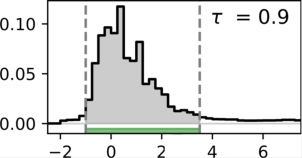
A Bayesian treatment can mitigate overconfidence in ReLU nets around the training data. But far away from them, ReLU Bayesian neural networks (BNNs) can still underestimate uncertainty and thus be asymptotically overconfident. This issue arises since the output variance of a BNN with finitely many features is quadratic in the distance from the data region. Meanwhile, Bayesian linear models with ReLU features converge, in the infinite-width limit, to a particular Gaussian process (GP) with a variance that grows cubically so that no asymptotic overconfidence can occur. While this may seem of mostly theoretical interest, in this work, we show that it can be used in practice to the benefit of BNNs. We extend finite ReLU BNNs with infinite ReLU features via the GP and show that the resulting model is asymptotically maximally uncertain far away from the data while the BNNs' predictive power is unaffected near the data. Although the resulting model approximates a full GP posterior, thanks to its structure, it can be applied post-hoc to any pre-trained ReLU BNN at a low cost.
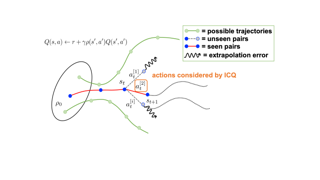
Learning from datasets without interaction with environments (Offline Learning) is an essential step to apply Reinforcement Learning (RL) algorithms in real-world scenarios.However, compared with the single-agent counterpart, offline multi-agent RL introduces more agents with the larger state and action space, which is more challenging but attracts little attention. We demonstrate current offline RL algorithms are ineffective in multi-agent systems due to the accumulated extrapolation error. In this paper, we propose a novel offline RL algorithm, named Implicit Constraint Q-learning (ICQ), which effectively alleviates the extrapolation error by only trusting the state-action pairs given in the dataset for value estimation. Moreover, we extend ICQ to multi-agent tasks by decomposing the joint-policy under the implicit constraint. Experimental results demonstrate that the extrapolation error is successfully controlled within a reasonable range and insensitive to the number of agents. We further show that ICQ achieves the state-of-the-art performance in the challenging multi-agent offline tasks (StarCraft II). Our code is public online at https://github.com/YiqinYang/ICQ.
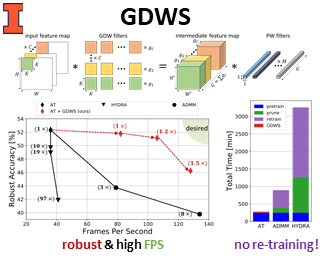
Despite their tremendous successes, convolutional neural networks (CNNs) incur high computational/storage costs and are vulnerable to adversarial perturbations. Recent works on robust model compression address these challenges by combining model compression techniques with adversarial training. But these methods are unable to improve throughput (frames-per-second) on real-life hardware while simultaneously preserving robustness to adversarial perturbations. To overcome this problem, we propose the method of Generalized Depthwise-Separable (GDWS) convolution - an efficient, universal, post-training approximation of a standard 2D convolution. GDWS dramatically improves the throughput of a standard pre-trained network on real-life hardware while preserving its robustness. Lastly, GDWS is scalable to large problem sizes since it operates on pre-trained models and doesn't require any additional training. We establish the optimality of GDWS as a 2D convolution approximator and present exact algorithms for constructing optimal GDWS convolutions under complexity and error constraints. We demonstrate the effectiveness of GDWS via extensive experiments on CIFAR-10, SVHN, and ImageNet datasets. Our code can be found at https://github.com/hsndbk4/GDWS.
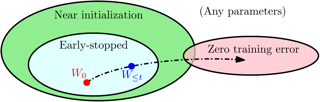
This work studies the behavior of shallow ReLU networks trained with the logistic loss via gradient descent on binary classification data where the underlying data distribution is general, and the (optimal) Bayes risk is not necessarily zero. In this setting, it is shown that gradient descent with early stopping achieves population risk arbitrarily close to optimal in terms of not just logistic and misclassification losses, but also in terms of calibration, meaning the sigmoid mapping of its outputs approximates the true underlying conditional distribution arbitrarily finely. Moreover, the necessary iteration, sample, and architectural complexities of this analysis all scale naturally with a certain complexity measure of the true conditional model. Lastly, while it is not shown that early stopping is necessary, it is shown that any classifier satisfying a basic local interpolation property is inconsistent.
To perform counterfactual reasoning in Structural Causal Models (SCMs), one needs to know the causal mechanisms, which provide factorizations of conditional distributions into noise sources and deterministic functions mapping realizations of noise to samples. Unfortunately, the causal mechanism is not uniquely identified by data that can be gathered by observing and interacting with the world, so there remains the question of how to choose causal mechanisms. In recent work, Oberst & Sontag (2019) propose Gumbel-max SCMs, which use Gumbel-max reparameterizations as the causal mechanism due to an appealing counterfactual stability property. However, the justification requires appealing to intuition. In this work, we instead argue for choosing a causal mechanism that is best under a quantitative criteria such as minimizing variance when estimating counterfactual treatment effects. We propose a parameterized family of causal mechanisms that generalize Gumbel-max. We show that they can be trained to minimize counterfactual effect variance and other losses on a distribution of queries of interest, yielding lower variance estimates of counterfactual treatment effect than fixed alternatives, also generalizing to queries not seen at training time.
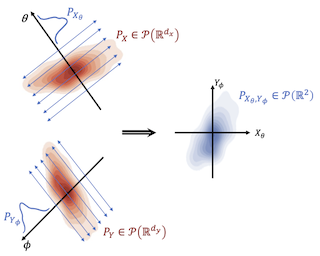
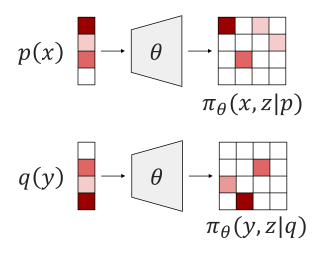
Mutual information (MI) is a fundamental measure of statistical dependence, with a myriad of applications to information theory, statistics, and machine learning. While it possesses many desirable structural properties, the estimation of high-dimensional MI from samples suffers from the curse of dimensionality. Motivated by statistical scalability to high dimensions, this paper proposes sliced MI (SMI) as a surrogate measure of dependence. SMI is defined as an average of MI terms between one-dimensional random projections. We show that it preserves many of the structural properties of classic MI, while gaining scalable computation and efficient estimation from samples. Furthermore, and in contrast to classic MI, SMI can grow as a result of deterministic transformations. This enables leveraging SMI for feature extraction by optimizing it over processing functions of raw data to identify useful representations thereof. Our theory is supported by numerical studies of independence testing and feature extraction, which demonstrate the potential gains SMI offers over classic MI for high-dimensional inference.
A number of recent studies of continuous variational autoencoder (VAE) models have noted, either directly or indirectly, the tendency of various parameter gradients to drift towards infinity during training. Because such gradients could potentially contribute to numerical instabilities, and are often framed as a problematic phenomena to be avoided, it may be tempting to shift to alternative energy functions that guarantee bounded gradients. But it remains an open question: What might the unintended consequences of such a restriction be? To address this issue, we examine how unbounded gradients relate to the regularization of a broad class of autoencoder-based architectures, including VAE models, as applied to data lying on or near a low-dimensional manifold (e.g., natural images). Our main finding is that, if the ultimate goal is to simultaneously avoid over-regularization (high reconstruction errors, sometimes referred to as posterior collapse) and under-regularization (excessive latent dimensions are not pruned from the model), then an autoencoder-based energy function with infinite gradients around optimal representations is provably required per a certain technical sense which we carefully detail. Given that both over- and under-regularization can directly lead to poor generated sample quality or suboptimal feature selection, this result suggests that heuristic modifications to or constraints …
Collaborating with humans requires rapidly adapting to their individual strengths, weaknesses, and preferences. Unfortunately, most standard multi-agent reinforcement learning techniques, such as self-play (SP) or population play (PP), produce agents that overfit to their training partners and do not generalize well to humans. Alternatively, researchers can collect human data, train a human model using behavioral cloning, and then use that model to train "human-aware" agents ("behavioral cloning play", or BCP). While such an approach can improve the generalization of agents to new human co-players, it involves the onerous and expensive step of collecting large amounts of human data first. Here, we study the problem of how to train agents that collaborate well with human partners without using human data. We argue that the crux of the problem is to produce a diverse set of training partners. Drawing inspiration from successful multi-agent approaches in competitive domains, we find that a surprisingly simple approach is highly effective. We train our agent partner as the best response to a population of self-play agents and their past checkpoints taken throughout training, a method we call Fictitious Co-Play (FCP). Our experiments focus on a two-player collaborative cooking simulator that has recently been proposed as a …
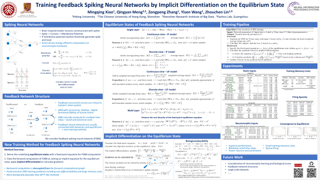
We introduce MixTraining, a new training paradigm for object detection that can improve the performance of existing detectors for free. MixTraining enhances data augmentation by utilizing augmentations of different strengths while excluding the strong augmentations of certain training samples that may be detrimental to training. In addition, it addresses localization noise and missing labels in human annotations by incorporating pseudo boxes that can compensate for these errors. Both of these MixTraining capabilities are made possible through bootstrapping on the detector, which can be used to predict the difficulty of training on a strong augmentation, as well as to generate reliable pseudo boxes thanks to the robustness of neural networks to labeling error. MixTraining is found to bring consistent improvements across various detectors on the COCO dataset. In particular, the performance of Faster R-CNN~\cite{ren2015faster} with a ResNet-50~\cite{he2016deep} backbone is improved from 41.7 mAP to 44.0 mAP, and the accuracy of Cascade-RCNN~\cite{cai2018cascade} with a Swin-Small~\cite{liu2021swin} backbone is raised from 50.9 mAP to 52.8 mAP.
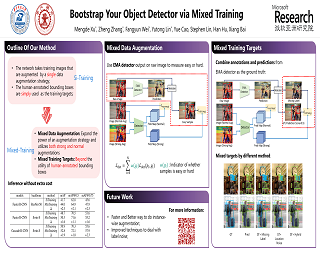
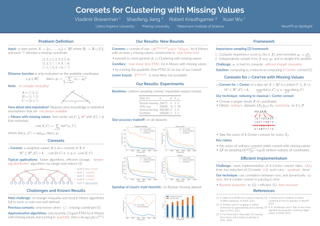
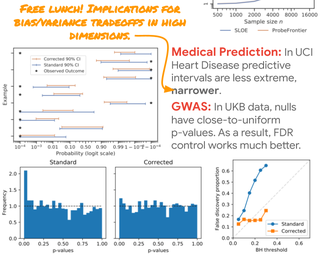
This paper develops a conformal method to compute prediction intervals for non-parametric regression that can automatically adapt to skewed data. Leveraging black-box machine learning algorithms to estimate the conditional distribution of the outcome using histograms, it translates their output into the shortest prediction intervals with approximate conditional coverage. The resulting prediction intervals provably have marginal coverage in finite samples, while asymptotically achieving conditional coverage and optimal length if the black-box model is consistent. Numerical experiments with simulated and real data demonstrate improved performance compared to state-of-the-art alternatives, including conformalized quantile regression and other distributional conformal prediction approaches.
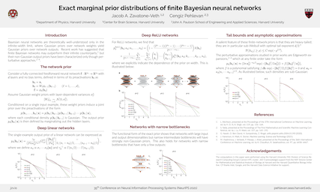
Spiking neural networks (SNNs) are brain-inspired models that enable energy-efficient implementation on neuromorphic hardware. However, the supervised training of SNNs remains a hard problem due to the discontinuity of the spiking neuron model. Most existing methods imitate the backpropagation framework and feedforward architectures for artificial neural networks, and use surrogate derivatives or compute gradients with respect to the spiking time to deal with the problem. These approaches either accumulate approximation errors or only propagate information limitedly through existing spikes, and usually require information propagation along time steps with large memory costs and biological implausibility. In this work, we consider feedback spiking neural networks, which are more brain-like, and propose a novel training method that does not rely on the exact reverse of the forward computation. First, we show that the average firing rates of SNNs with feedback connections would gradually evolve to an equilibrium state along time, which follows a fixed-point equation. Then by viewing the forward computation of feedback SNNs as a black-box solver for this equation, and leveraging the implicit differentiation on the equation, we can compute the gradient for parameters without considering the exact forward procedure. In this way, the forward and backward procedures are decoupled and …
We investigate the training of sparse layers that use different parameters for different inputs based on hashing in large Transformer models. Specifically, we modify the feedforward layer to hash to different sets of weights depending on the current token, over all tokens in the sequence. We show that this procedure either outperforms or is competitive with learning-to-route mixture-of-expert methods such as Switch Transformers and BASE Layers, while requiring no routing parameters or extra terms in the objective function such as a load balancing loss, and no sophisticated assignment algorithm. We study the performance of different hashing techniques, hash sizes and input features, and show that balanced and random hashes focused on the most local features work best, compared to either learning clusters or using longer-range context. We show our approach works well both on large language modeling and dialogue tasks, and on downstream fine-tuning tasks.
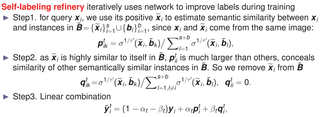
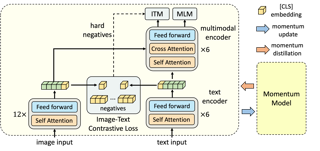
For an image query, unsupervised contrastive learning labels crops of the same image as positives, and other image crops as negatives. Although intuitive, such a native label assignment strategy cannot reveal the underlying semantic similarity between a query and its positives and negatives, and impairs performance, since some negatives are semantically similar to the query or even share the same semantic class as the query. In this work, we first prove that for contrastive learning, inaccurate label assignment heavily impairs its generalization for semantic instance discrimination, while accurate labels benefit its generalization. Inspired by this theory, we propose a novel self-labeling refinement approach for contrastive learning. It improves the label quality via two complementary modules: (i) self-labeling refinery (SLR) to generate accurate labels and (ii) momentum mixup (MM) to enhance similarity between query and its positive. SLR uses a positive of a query to estimate semantic similarity between a query and its positive and negatives, and combines estimated similarity with vanilla label assignment in contrastive learning to iteratively generate more accurate and informative soft labels. We theoretically show that our SLR can exactly recover the true semantic labels of label-corrupted data, and supervises networks to achieve zero prediction error on …
We propose the use of the vector-valued distance to compute distances and extract geometric information from the manifold of symmetric positive definite matrices (SPD), and develop gyrovector calculus, constructing analogs of vector space operations in this curved space. We implement these operations and showcase their versatility in the tasks of knowledge graph completion, item recommendation, and question answering. In experiments, the SPD models outperform their equivalents in Euclidean and hyperbolic space. The vector-valued distance allows us to visualize embeddings, showing that the models learn to disentangle representations of positive samples from negative ones.
In this paper, we provide theoretical results of estimation bounds and excess risk upper bounds for support vector machine (SVM) with sparse multi-kernel representation. These convergence rates for multi-kernel SVM are established by analyzing a Lasso-type regularized learning scheme within composite multi-kernel spaces. It is shown that the oracle rates of convergence of classifiers depend on the complexity of multi-kernels, the sparsity, a Bernstein condition and the sample size, which significantly improves on previous results even for the additive or linear cases. In summary, this paper not only provides unified theoretical results for multi-kernel SVMs, but also enriches the literature on high-dimensional nonparametric classification.
In complex systems, we often observe complex global behavior emerge from a collection of agents interacting with each other in their environment, with each individual agent acting only on locally available information, without knowing the full picture. Such systems have inspired development of artificial intelligence algorithms in areas such as swarm optimization and cellular automata. Motivated by the emergence of collective behavior from complex cellular systems, we build systems that feed each sensory input from the environment into distinct, but identical neural networks, each with no fixed relationship with one another. We show that these sensory networks can be trained to integrate information received locally, and through communication via an attention mechanism, can collectively produce a globally coherent policy. Moreover, the system can still perform its task even if the ordering of its inputs is randomly permuted several times during an episode. These permutation invariant systems also display useful robustness and generalization properties that are broadly applicable. Interactive demo and videos of our results: https://attentionneuron.github.io
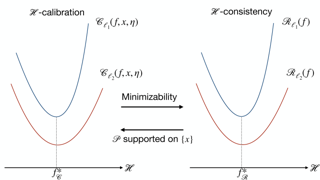
Adversarial robustness is a critical property in a variety of modern machine learning applications. While it has been the subject of several recent theoretical studies, many important questions related to adversarial robustness are still open. In this work, we study a fundamental question regarding Bayes optimality for adversarial robustness. We provide general sufficient conditions under which the existence of a Bayes optimal classifier can be guaranteed for adversarial robustness. Our results can provide a useful tool for a subsequent study of surrogate losses in adversarial robustness and their consistency properties.
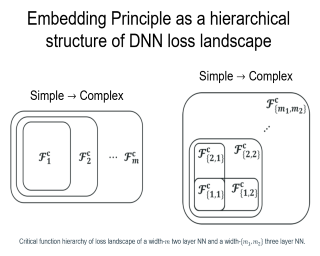
Understanding the structure of loss landscape of deep neural networks (DNNs) is obviously important. In this work, we prove an embedding principle that the loss landscape of a DNN "contains" all the critical points of all the narrower DNNs. More precisely, we propose a critical embedding such that any critical point, e.g., local or global minima, of a narrower DNN can be embedded to a critical point/affine subspace of the target DNN with higher degeneracy and preserving the DNN output function. Note that, given any training data, differentiable loss function and differentiable activation function, this embedding structure of critical points holds.This general structure of DNNs is starkly different from other nonconvex problems such as protein-folding.Empirically, we find that a wide DNN is often attracted by highly-degenerate critical points that are embedded from narrow DNNs. The embedding principle provides a new perspective to study the general easy optimization of wide DNNs and unravels a potential implicit low-complexity regularization during the training.Overall, our work provides a skeleton for the study of loss landscape of DNNs and its implication, by which a more exact and comprehensive understanding can be anticipated in the near future.
Stochastic sparse linear bandits offer a practical model for high-dimensional online decision-making problems and have a rich information-regret structure. In this work we explore the use of information-directed sampling (IDS), which naturally balances the information-regret trade-off. We develop a class of information-theoretic Bayesian regret bounds that nearly match existing lower bounds on a variety of problem instances, demonstrating the adaptivity of IDS. To efficiently implement sparse IDS, we propose an empirical Bayesian approach for sparse posterior sampling using a spike-and-slab Gaussian-Laplace prior. Numerical results demonstrate significant regret reductions by sparse IDS relative to several baselines.
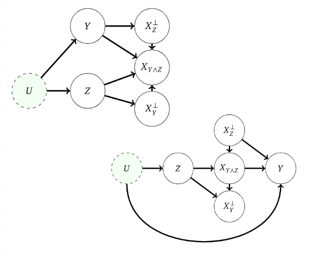
Informally, a 'spurious correlation' is the dependence of a model on some aspect of the input data that an analyst thinks shouldn't matter. In machine learning, these have a know-it-when-you-see-it character; e.g., changing the gender of a sentence's subject changes a sentiment predictor's output. To check for spurious correlations, we can 'stress test' models by perturbing irrelevant parts of input data and seeing if model predictions change. In this paper, we study stress testing using the tools of causal inference. We introduce counterfactual invariance as a formalization of the requirement that changing irrelevant parts of the input shouldn't change model predictions. We connect counterfactual invariance to out-of-domain model performance, and provide practical schemes for learning (approximately) counterfactual invariant predictors (without access to counterfactual examples). It turns out that both the means and implications of counterfactual invariance depend fundamentally on the true underlying causal structure of the data---in particular, whether the label causes the features or the features cause the label. Distinct causal structures require distinct regularization schemes to induce counterfactual invariance. Similarly, counterfactual invariance implies different domain shift guarantees depending on the underlying causal structure. This theory is supported by empirical results on text classification.
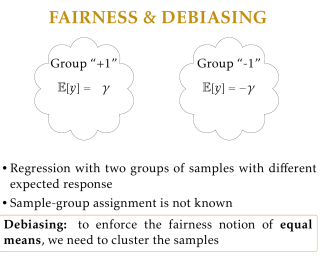
In this paper, we study the problem of fair sparse regression on a biased dataset where bias depends upon a hidden binary attribute. The presence of a hidden attribute adds an extra layer of complexity to the problem by combining sparse regression and clustering with unknown binary labels. The corresponding optimization problem is combinatorial, but we propose a novel relaxation of it as an invex optimization problem. To the best of our knowledge, this is the first invex relaxation for a combinatorial problem. We show that the inclusion of the debiasing/fairness constraint in our model has no adverse effect on the performance. Rather, it enables the recovery of the hidden attribute. The support of our recovered regression parameter vector matches exactly with the true parameter vector. Moreover, we simultaneously solve the clustering problem by recovering the exact value of the hidden attribute for each sample. Our method uses carefully constructed primal dual witnesses to provide theoretical guarantees for the combinatorial problem. To that end, we show that the sample complexity of our method is logarithmic in terms of the dimension of the regression parameter vector.
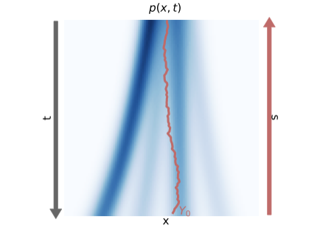
Discrete-time diffusion-based generative models and score matching methods have shown promising results in modeling high-dimensional image data. Recently, Song et al. (2021) show that diffusion processes that transform data into noise can be reversed via learning the score function, i.e. the gradient of the log-density of the perturbed data. They propose to plug the learned score function into an inverse formula to define a generative diffusion process. Despite the empirical success, a theoretical underpinning of this procedure is still lacking. In this work, we approach the (continuous-time) generative diffusion directly and derive a variational framework for likelihood estimation, which includes continuous-time normalizing flows as a special case, and can be seen as an infinitely deep variational autoencoder. Under this framework, we show that minimizing the score-matching loss is equivalent to maximizing a lower bound of the likelihood of the plug-in reverse SDE proposed by Song et al. (2021), bridging the theoretical gap.
One of the key drivers of complexity in the classical (stochastic) multi-armed bandit (MAB) problem is the difference between mean rewards in the top two arms, also known as the instance gap. The celebrated Upper Confidence Bound (UCB) policy is among the simplest optimism-based MAB algorithms that naturally adapts to this gap: for a horizon of play n, it achieves optimal O(log n) regret in instances with "large" gaps, and a near-optimal O(\sqrt{n log n}) minimax regret when the gap can be arbitrarily "small." This paper provides new results on the arm-sampling behavior of UCB, leading to several important insights. Among these, it is shown that arm-sampling rates under UCB are asymptotically deterministic, regardless of the problem complexity. This discovery facilitates new sharp asymptotics and a novel alternative proof for the O(\sqrt{n log n}) minimax regret of UCB. Furthermore, the paper also provides the first complete process-level characterization of the MAB problem in the conventional diffusion scaling. Among other things, the "small" gap worst-case lens adopted in this paper also reveals profound distinctions between the behavior of UCB and Thompson Sampling, such as an "incomplete learning" phenomenon characteristic of the latter.

Identifying the common structure of neural dynamics across subjects is key for extracting unifying principles of brain computation and for many brain machine interface applications. Here, we propose a novel probabilistic approach for aligning stimulus-evoked responses from multiple animals in a common low dimensional manifold and use hierarchical inference to identify which stimulus drives neural activity in any given trial. Our probabilistic decoder is robust to a range of features of the neural responses and significantly outperforms existing neural alignment procedures. When applied to recordings from the mouse olfactory bulb, our approach reveals low-dimensional population dynamics that are odor specific and have consistent structure across animals. Thus, our decoder can be used for increasing the robustness and scalability of neural-based chemical detection.

Partial label learning (PLL) is a typical weakly supervised learning problem, where each training example is associated with a set of candidate labels among which only one is true. Most existing PLL approaches assume that the incorrect labels in each training example are randomly picked as the candidate labels. However, this assumption is not realistic since the candidate labels are always instance-dependent. In this paper, we consider instance-dependent PLL and assume that each example is associated with a latent label distribution constituted by the real number of each label, representing the degree to each label describing the feature. The incorrect label with a high degree is more likely to be annotated as the candidate label. Therefore, the latent label distribution is the essential labeling information in partially labeled examples and worth being leveraged for predictive model training. Motivated by this consideration, we propose a novel PLL method that recovers the label distribution as a label enhancement (LE) process and trains the predictive model iteratively in every epoch. Specifically, we assume the true posterior density of the latent label distribution takes on the variational approximate Dirichlet density parameterized by an inference model. Then the evidence lower bound is deduced for optimizing …
Some researchers speculate that intelligent reinforcement learning (RL) agents would be incentivized to seek resources and power in pursuit of the objectives we specify for them. Other researchers point out that RL agents need not have human-like power-seeking instincts. To clarify this discussion, we develop the first formal theory of the statistical tendencies of optimal policies. In the context of Markov decision processes, we prove that certain environmental symmetries are sufficient for optimal policies to tend to seek power over the environment. These symmetries exist in many environments in which the agent can be shut down or destroyed. We prove that in these environments, most reward functions make it optimal to seek power by keeping a range of options available and, when maximizing average reward, by navigating towards larger sets of potential terminal states.
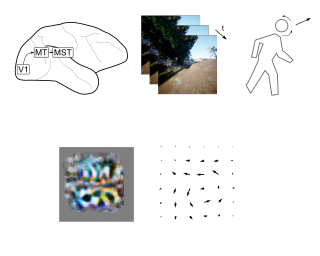
Neurons in the dorsal visual pathway of the mammalian brain are selective for motion stimuli, with the complexity of stimulus representations increasing along the hierarchy. This progression is similar to that of the ventral visual pathway, which is well characterized by artificial neural networks (ANNs) optimized for object recognition. In contrast, there are no image-computable models of the dorsal stream with comparable explanatory power. We hypothesized that the properties of dorsal stream neurons could be explained by a simple learning objective: the need for an organism to orient itself during self-motion. To test this hypothesis, we trained a 3D ResNet to predict an agent's self-motion parameters from visual stimuli in a simulated environment. We found that the responses in this network accounted well for the selectivity of neurons in a large database of single-neuron recordings from the dorsal visual stream of non-human primates. In contrast, ANNs trained on an action recognition dataset through supervised or self-supervised learning could not explain responses in the dorsal stream, despite also being trained on naturalistic videos with moving objects. These results demonstrate that an ecologically relevant cost function can account for dorsal stream properties in the primate brain.
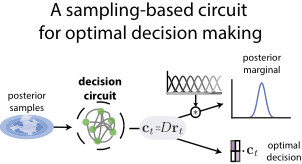
Many features of human and animal behavior can be understood in the framework of Bayesian inference and optimal decision making, but the biological substrate of such processes is not fully understood. Neural sampling provides a flexible code for probabilistic inference in high dimensions and explains key features of sensory responses under experimental manipulations of uncertainty. However, since it encodes uncertainty implicitly, across time and neurons, it remains unclear how such representations can be used for decision making. Here we propose a spiking network model that maps neural samples of a task-specific marginal distribution into an instantaneous representation of uncertainty via a procedure inspired by online kernel density estimation, so that its output can be readily used for decision making. Our model is consistent with experimental results at the level of single neurons and populations, and makes predictions for how neural responses and decisions could be modulated by uncertainty and prior biases. More generally, our work brings together conflicting perspectives on probabilistic brain computation.
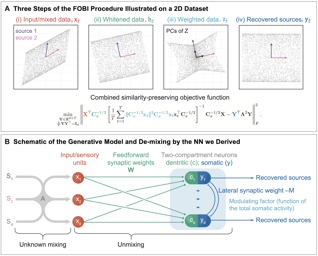
The brain effortlessly solves blind source separation (BSS) problems, but the algorithm it uses remains elusive. In signal processing, linear BSS problems are often solved by Independent Component Analysis (ICA). To serve as a model of a biological circuit, the ICA neural network (NN) must satisfy at least the following requirements: 1. The algorithm must operate in the online setting where data samples are streamed one at a time, and the NN computes the sources on the fly without storing any significant fraction of the data in memory. 2. The synaptic weight update is local, i.e., it depends only on the biophysical variables present in the vicinity of a synapse. Here, we propose a novel objective function for ICA from which we derive a biologically plausible NN, including both the neural architecture and the synaptic learning rules. Interestingly, our algorithm relies on modulating synaptic plasticity by the total activity of the output neurons. In the brain, this could be accomplished by neuromodulators, extracellular calcium, local field potential, or nitric oxide.
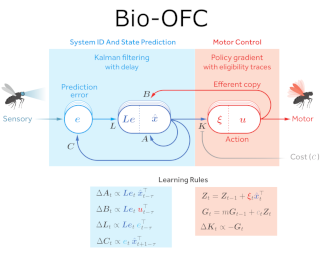
A major problem in motor control is understanding how the brain plans and executes proper movements in the face of delayed and noisy stimuli. A prominent framework for addressing such control problems is Optimal Feedback Control (OFC). OFC generates control actions that optimize behaviorally relevant criteria by integrating noisy sensory stimuli and the predictions of an internal model using the Kalman filter or its extensions. However, a satisfactory neural model of Kalman filtering and control is lacking because existing proposals have the following limitations: not considering the delay of sensory feedback, training in alternating phases, requiring knowledge of the noise covariance matrices, as well as that of systems dynamics. Moreover, the majority of these studies considered Kalman filtering in isolation, and not jointly with control. To address these shortcomings, we introduce a novel online algorithm which combines adaptive Kalman filtering with a model free control approach (i.e., policy gradient algorithm). We implement this algorithm in a biologically plausible neural network with local synaptic plasticity rules. This network, with local synaptic plasticity rules, performs system identification, Kalman filtering and control with delayed noisy sensory feedback. This network performs system identification and Kalman filtering, without the need for multiple phases with distinct …
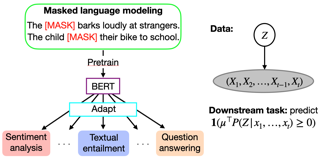
Pretrained language models have achieved state-of-the-art performance when adapted to a downstream NLP task. However, theoretical analysis of these models is scarce and challenging since the pretraining and downstream tasks can be very different. We propose an analysis framework that links the pretraining and downstream tasks with an underlying latent variable generative model of text -- the downstream classifier must recover a function of the posterior distribution over the latent variables. We analyze head tuning (learning a classifier on top of the frozen pretrained model) and prompt tuning in this setting. The generative model in our analysis is either a Hidden Markov Model (HMM) or an HMM augmented with a latent memory component, motivated by long-term dependencies in natural language. We show that 1) under certain non-degeneracy conditions on the HMM, simple classification heads can solve the downstream task, 2) prompt tuning obtains downstream guarantees with weaker non-degeneracy conditions, and 3) our recovery guarantees for the memory-augmented HMM are stronger than for the vanilla HMM because task-relevant information is easier to recover from the long-term memory. Experiments on synthetically generated data from HMMs back our theoretical findings.

Vision transformers (ViTs) have pushed the state-of-the-art for various visual recognition tasks by patch-wise image tokenization followed by self-attention. However, the employment of self-attention modules results in a quadratic complexity in both computation and memory usage. Various attempts on approximating the self-attention computation with linear complexity have been made in Natural Language Processing. However, an in-depth analysis in this work shows that they are either theoretically flawed or empirically ineffective for visual recognition. We further identify that their limitations are rooted in keeping the softmax self-attention during approximations. Specifically, conventional self-attention is computed by normalizing the scaled dot-product between token feature vectors. Keeping this softmax operation challenges any subsequent linearization efforts. Based on this insight, for the first time, a softmax-free transformer or SOFT is proposed. To remove softmax in self-attention, Gaussian kernel function is used to replace the dot-product similarity without further normalization. This enables a full self-attention matrix to be approximated via a low-rank matrix decomposition. The robustness of the approximation is achieved by calculating its Moore-Penrose inverse using a Newton-Raphson method. Extensive experiments on ImageNet show that our SOFT significantly improves the computational efficiency of existing ViT variants. Crucially, with a linear complexity, much longer token sequences …
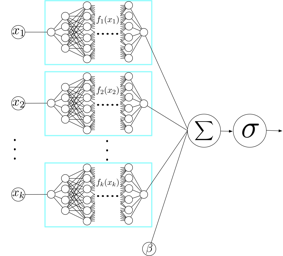
Deep neural networks (DNNs) are powerful black-box predictors that have achieved impressive performance on a wide variety of tasks. However, their accuracy comes at the cost of intelligibility: it is usually unclear how they make their decisions. This hinders their applicability to high stakes decision-making domains such as healthcare. We propose Neural Additive Models (NAMs) which combine some of the expressivity of DNNs with the inherent intelligibility of generalized additive models. NAMs learn a linear combination of neural networks that each attend to a single input feature. These networks are trained jointly and can learn arbitrarily complex relationships between their input feature and the output. Our experiments on regression and classification datasets show that NAMs are more accurate than widely used intelligible models such as logistic regression and shallow decision trees. They perform similarly to existing state-of-the-art generalized additive models in accuracy, but are more flexible because they are based on neural nets instead of boosted trees. To demonstrate this, we show how NAMs can be used for multitask learning on synthetic data and on the COMPAS recidivism data due to their composability, and demonstrate that the differentiability of NAMs allows them to train more complex interpretable models for COVID-19.
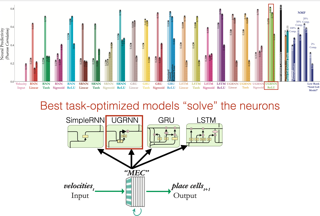
Medial entorhinal cortex (MEC) supports a wide range of navigational and memory related behaviors.Well-known experimental results have revealed specialized cell types in MEC --- e.g. grid, border, and head-direction cells --- whose highly stereotypical response profiles are suggestive of the role they might play in supporting MEC functionality. However, the majority of MEC neurons do not exhibit stereotypical firing patterns.How should the response profiles of these more "heterogeneous" cells be described, and how do they contribute to behavior?In this work, we took a computational approach to addressing these questions.We first performed a statistical analysis that shows that heterogeneous MEC cells are just as reliable in their response patterns as the more stereotypical cell types, suggesting that they have a coherent functional role.Next, we evaluated a spectrum of candidate models in terms of their ability to describe the response profiles of both stereotypical and heterogeneous MEC cells.We found that recently developed task-optimized neural network models are substantially better than traditional grid cell-centric models at matching most MEC neuronal response profiles --- including those of grid cells themselves --- despite not being explicitly trained for this purpose.Specific choices of network architecture (such as gated nonlinearities and an explicit intermediate place cell representation) …
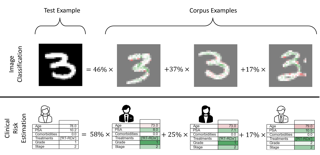
Modern machine learning models are complicated. Most of them rely on convoluted latent representations of their input to issue a prediction. To achieve greater transparency than a black-box that connects inputs to predictions, it is necessary to gain a deeper understanding of these latent representations. To that aim, we propose SimplEx: a user-centred method that provides example-based explanations with reference to a freely selected set of examples, called the corpus. SimplEx uses the corpus to improve the user’s understanding of the latent space with post-hoc explanations answering two questions: (1) Which corpus examples explain the prediction issued for a given test example? (2) What features of these corpus examples are relevant for the model to relate them to the test example? SimplEx provides an answer by reconstructing the test latent representation as a mixture of corpus latent representations. Further, we propose a novel approach, the integrated Jacobian, that allows SimplEx to make explicit the contribution of each corpus feature in the mixture. Through experiments on tasks ranging from mortality prediction to image classification, we demonstrate that these decompositions are robust and accurate. With illustrative use cases in medicine, we show that SimplEx empowers the user by highlighting relevant patterns in …
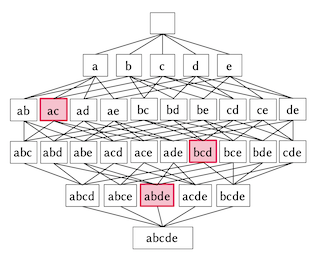
Rule sets are highly interpretable logical models in which the predicates for decision are expressed in disjunctive normal form (DNF, OR-of-ANDs), or, equivalently, the overall model comprises an unordered collection of if-then decision rules. In this paper, we consider a submodular optimization based approach for learning rule sets. The learning problem is framed as a subset selection task in which a subset of all possible rules needs to be selected to form an accurate and interpretable rule set. We employ an objective function that exhibits submodularity and thus is amenable to submodular optimization techniques. To overcome the difficulty arose from dealing with the exponential-sized ground set of rules, the subproblem of searching a rule is casted as another subset selection task that asks for a subset of features. We show it is possible to write the induced objective function for the subproblem as a difference of two submodular (DS) functions to make it approximately solvable by DS optimization algorithms. Overall, the proposed approach is simple, scalable, and likely to be benefited from further research on submodular optimization. Experiments on real datasets demonstrate the effectiveness of our method.
Recent works reveal that feature or label smoothing lies at the core of Graph Neural Networks (GNNs). Concretely, they show feature smoothing combined with simple linear regression achieves comparable performance with the carefully designed GNNs, and a simple MLP model with label smoothing of its prediction can outperform the vanilla GCN. Though an interesting finding, smoothing has not been well understood, especially regarding how to control the extent of smoothness. Intuitively, too small or too large smoothing iterations may cause under-smoothing or over-smoothing and can lead to sub-optimal performance. Moreover, the extent of smoothness is node-specific, depending on its degree and local structure. To this end, we propose a novel algorithm called node-dependent local smoothing (NDLS), which aims to control the smoothness of every node by setting a node-specific smoothing iteration. Specifically, NDLS computes influence scores based on the adjacency matrix and selects the iteration number by setting a threshold on the scores. Once selected, the iteration number can be applied to both feature smoothing and label smoothing. Experimental results demonstrate that NDLS enjoys high accuracy -- state-of-the-art performance on node classifications tasks, flexibility -- can be incorporated with any models, scalability and efficiency -- can support large scale graphs …
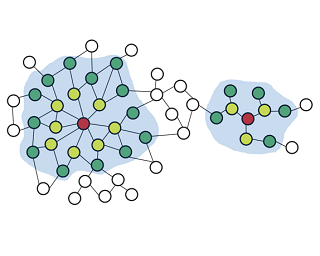
Message passing is the core of most graph models such as Graph Convolutional Network (GCN) and Label Propagation (LP), which usually require a large number of clean labeled data to smooth out the neighborhood over the graph. However, the labeling process can be tedious, costly, and error-prone in practice. In this paper, we propose to unify active learning (AL) and message passing towards minimizing labeling costs, e.g., making use of few and unreliable labels that can be obtained cheaply. We make two contributions towards that end. First, we open up a perspective by drawing a connection between AL enforcing message passing and social influence maximization, ensuring that the selected samples effectively improve the model performance. Second, we propose an extension to the influence model that incorporates an explicit quality factor to model label noise. In this way, we derive a fundamentally new AL selection criterion for GCN and LP--reliable influence maximization (RIM)--by considering quantity and quality of influence simultaneously. Empirical studies on public datasets show that RIM significantly outperforms current AL methods in terms of accuracy and efficiency.
We provide the first global optimization landscape analysis of Neural Collapse -- an intriguing empirical phenomenon that arises in the last-layer classifiers and features of neural networks during the terminal phase of training. As recently reported by Papyan et al., this phenomenon implies that (i) the class means and the last-layer classifiers all collapse to the vertices of a Simplex Equiangular Tight Frame (ETF) up to scaling, and (ii) cross-example within-class variability of last-layer activations collapses to zero. We study the problem based on a simplified unconstrained feature model, which isolates the topmost layers from the classifier of the neural network. In this context, we show that the classical cross-entropy loss with weight decay has a benign global landscape, in the sense that the only global minimizers are the Simplex ETFs while all other critical points are strict saddles whose Hessian exhibit negative curvature directions. Our analysis of the simplified model not only explains what kind of features are learned in the last layer, but also shows why they can be efficiently optimized, matching the empirical observations in practical deep network architectures. These findings provide important practical implications. As an example, our experiments demonstrate that one may set the feature …
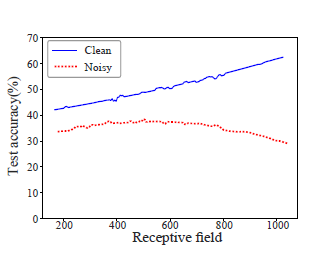
Understanding the generalization of deep neural networks is one of the most important tasks in deep learning. Although much progress has been made, theoretical error bounds still often behave disparately from empirical observations. In this work, we develop margin-based generalization bounds, where the margins are normalized with optimal transport costs between independent random subsets sampled from the training distribution. In particular, the optimal transport cost can be interpreted as a generalization of variance which captures the structural properties of the learned feature space. Our bounds robustly predict the generalization error, given training data and network parameters, on large scale datasets. Theoretically, we demonstrate that the concentration and separation of features play crucial roles in generalization, supporting empirical results in the literature.
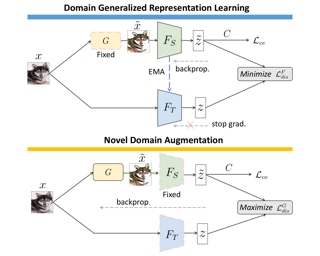
Domain generalization (DG) aims to transfer the learning task from a single or multiple source domains to unseen target domains. To extract and leverage the information which exhibits sufficient generalization ability, we propose a simple yet effective approach of Adversarial Teacher-Student Representation Learning, with the goal of deriving the domain generalizable representations via generating and exploring out-of-source data distributions. Our proposed framework advances Teacher-Student learning in an adversarial learning manner, which alternates between knowledge-distillation based representation learning and novel-domain data augmentation. The former progressively updates the teacher network for deriving domain-generalizable representations, while the latter synthesizes data out-of-source yet plausible distributions. Extensive image classification experiments on benchmark datasets in multiple and single source DG settings confirm that, our model exhibits sufficient generalization ability and performs favorably against state-of-the-art DG methods.
Tensor network methods have been a key ingredient of advances in condensed matter physics and have recently sparked interest in the machine learning community for their ability to compactly represent very high-dimensional objects. Tensor network methods can for example be used to efficiently learn linear models in exponentially large feature spaces [Stoudenmire and Schwab, 2016]. In this work, we derive upper and lower bounds on the VC dimension and pseudo-dimension of a large class of tensor network models for classification, regression and completion. Our upper bounds hold for linear models parameterized by arbitrary tensor network structures, and we derive lower bounds for common tensor decomposition models~(CP, Tensor Train, Tensor Ring and Tucker) showing the tightness of our general upper bound. These results are used to derive a generalization bound which can be applied to classification with low rank matrices as well as linear classifiers based on any of the commonly used tensor decomposition models. As a corollary of our results, we obtain a bound on the VC dimension of the matrix product state classifier introduced in [Stoudenmire and Schwab, 2016] as a function of the so-called bond dimension~(i.e. tensor train rank), which answers an open problem listed by Cirac, Garre-Rubio …
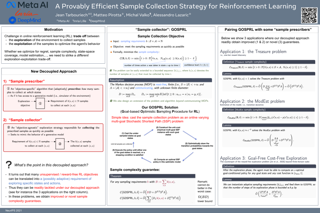
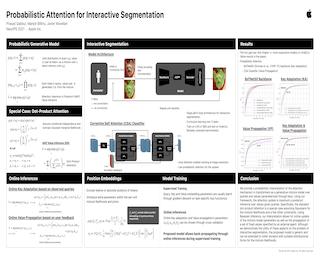
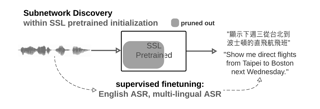
Self-supervised speech representation learning (speech SSL) has demonstrated the benefit of scale in learning rich representations for Automatic Speech Recognition (ASR) with limited paired data, such as wav2vec 2.0. We investigate the existence of sparse subnetworks in pre-trained speech SSL models that achieve even better low-resource ASR results. However, directly applying widely adopted pruning methods such as the Lottery Ticket Hypothesis (LTH) is suboptimal in the computational cost needed. Moreover, we show that the discovered subnetworks yield minimal performance gain compared to the original dense network.We present Prune-Adjust-Re-Prune (PARP), which discovers and finetunes subnetworks for much better performance, while only requiring a single downstream ASR finetuning run. PARP is inspired by our surprising observation that subnetworks pruned for pre-training tasks need merely a slight adjustment to achieve a sizeable performance boost in downstream ASR tasks. Extensive experiments on low-resource ASR verify (1) sparse subnetworks exist in mono-lingual/multi-lingual pre-trained speech SSL, and (2) the computational advantage and performance gain of PARP over baseline pruning methods.In particular, on the 10min Librispeech split without LM decoding, PARP discovers subnetworks from wav2vec 2.0 with an absolute 10.9%/12.6% WER decrease compared to the full model. We further demonstrate the effectiveness of PARP via: cross-lingual pruning …
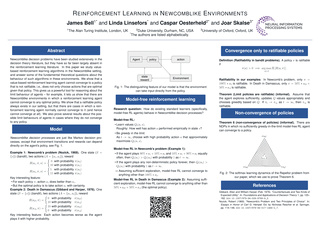
Newcomblike decision problems have been studied extensively in the decision theory literature, but they have so far been largely absent in the reinforcement learning literature. In this paper we study value-based reinforcement learning algorithms in the Newcomblike setting, and answer some of the fundamental theoretical questions about the behaviour of such algorithms in these environments. We show that a value-based reinforcement learning agent cannot converge to a policy that is not \emph{ratifiable}, i.e., does not only choose actions that are optimal given that policy. This gives us a powerful tool for reasoning about the limit behaviour of agents -- for example, it lets us show that there are Newcomblike environments in which a reinforcement learning agent cannot converge to any optimal policy. We show that a ratifiable policy always exists in our setting, but that there are cases in which a reinforcement learning agent normally cannot converge to it (and hence cannot converge at all). We also prove several results about the possible limit behaviours of agents in cases where they do not converge to any policy.
Despite the predominant use of first-order methods for training deep learning models, second-order methods, and in particular, natural gradient methods, remain of interest because of their potential for accelerating training through the use of curvature information. Several methods with non-diagonal preconditioning matrices, including KFAC, Shampoo, and K-BFGS, have been proposed and shown to be effective. Based on the so-called tensor normal (TN) distribution, we propose and analyze a brand new approximate natural gradient method, Tensor Normal Training (TNT), which like Shampoo, only requires knowledge of the shape of the training parameters. By approximating the probabilistically based Fisher matrix, as opposed to the empirical Fisher matrix, our method uses the block-wise covariance of the sampling based gradient as the pre-conditioning matrix. Moreover, the assumption that the sampling-based (tensor) gradient follows a TN distribution, ensures that its covariance has a Kronecker separable structure, which leads to a tractable approximation to the Fisher matrix. Consequently, TNT's memory requirements and per-iteration computational costs are only slightly higher than those for first-order methods. In our experiments, TNT exhibited superior optimization performance to state-of-the-art first-order methods, and comparable optimization performance to the state-of-the-art second-order methods KFAC and Shampoo. Moreover, TNT demonstrated its ability to generalize as …
Offline reinforcement learning (RL) defines the task of learning from a fixed batch of data. Due to errors in value estimation from out-of-distribution actions, most offline RL algorithms take the approach of constraining or regularizing the policy with the actions contained in the dataset. Built on pre-existing RL algorithms, modifications to make an RL algorithm work offline comes at the cost of additional complexity. Offline RL algorithms introduce new hyperparameters and often leverage secondary components such as generative models, while adjusting the underlying RL algorithm. In this paper we aim to make a deep RL algorithm work while making minimal changes. We find that we can match the performance of state-of-the-art offline RL algorithms by simply adding a behavior cloning term to the policy update of an online RL algorithm and normalizing the data. The resulting algorithm is a simple to implement and tune baseline, while more than halving the overall run time by removing the additional computational overheads of previous methods.
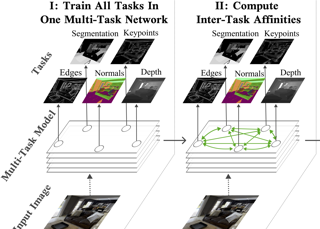
Multi-task learning can leverage information learned by one task to benefit the training of other tasks. Despite this capacity, naively training all tasks together in one model often degrades performance, and exhaustively searching through combinations of task groupings can be prohibitively expensive. As a result, efficiently identifying the tasks that would benefit from training together remains a challenging design question without a clear solution. In this paper, we suggest an approach to select which tasks should train together in multi-task learning models. Our method determines task groupings in a single run by training all tasks together and quantifying the effect to which one task's gradient would affect another task's loss. On the large-scale Taskonomy computer vision dataset, we find this method can decrease test loss by 10.0% compared to simply training all tasks together while operating 11.6 times faster than a state-of-the-art task grouping method.
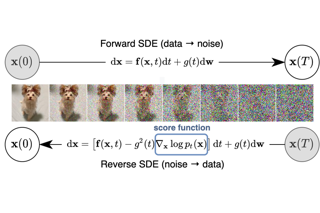
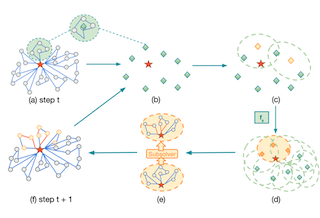
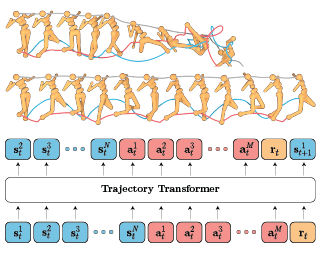
Reinforcement learning (RL) is typically viewed as the problem of estimating single-step policies (for model-free RL) or single-step models (for model-based RL), leveraging the Markov property to factorize the problem in time. However, we can also view RL as a sequence modeling problem: predict a sequence of actions that leads to a sequence of high rewards. Viewed in this way, it is tempting to consider whether powerful, high-capacity sequence prediction models that work well in other supervised learning domains, such as natural-language processing, can also provide simple and effective solutions to the RL problem. To this end, we explore how RL can be reframed as "one big sequence modeling" problem, using state-of-the-art Transformer architectures to model distributions over sequences of states, actions, and rewards. Addressing RL as a sequence modeling problem significantly simplifies a range of design decisions: we no longer require separate behavior policy constraints, as is common in prior work on offline model-free RL, and we no longer require ensembles or other epistemic uncertainty estimators, as is common in prior work on model-based RL. All of these roles are filled by the same Transformer sequence model. In our experiments, we demonstrate the flexibility of this approach across imitation …
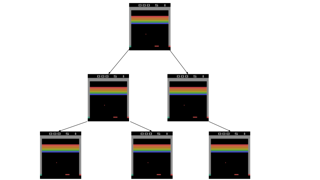
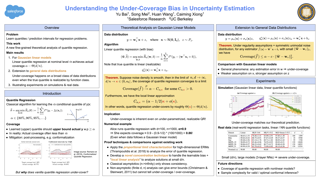

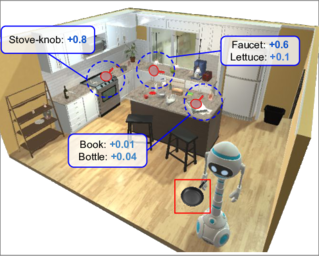
Complex physical tasks entail a sequence of object interactions, each with its own preconditions -- which can be difficult for robotic agents to learn efficiently solely through their own experience. We introduce an approach to discover activity-context priors from in-the-wild egocentric video captured with human worn cameras. For a given object, an activity-context prior represents the set of other compatible objects that are required for activities to succeed (e.g., a knife and cutting board brought together with a tomato are conducive to cutting). We encode our video-based prior as an auxiliary reward function that encourages an agent to bring compatible objects together before attempting an interaction. In this way, our model translates everyday human experience into embodied agent skills. We demonstrate our idea using egocentric EPIC-Kitchens video of people performing unscripted kitchen activities to benefit virtual household robotic agents performing various complex tasks in AI2-iTHOR, significantly accelerating agent learning.
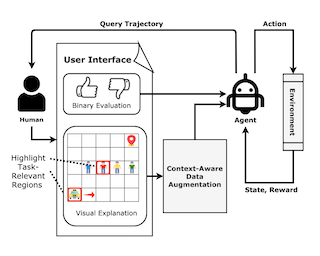
Human explanation (e.g., in terms of feature importance) has been recently used to extend the communication channel between human and agent in interactive machine learning. Under this setting, human trainers provide not only the ground truth but also some form of explanation. However, this kind of human guidance was only investigated in supervised learning tasks, and it remains unclear how to best incorporate this type of human knowledge into deep reinforcement learning. In this paper, we present the first study of using human visual explanations in human-in-the-loop reinforcement learning (HIRL). We focus on the task of learning from feedback, in which the human trainer not only gives binary evaluative "good" or "bad" feedback for queried state-action pairs, but also provides a visual explanation by annotating relevant features in images. We propose EXPAND (EXPlanation AugmeNted feeDback) to encourage the model to encode task-relevant features through a context-aware data augmentation that only perturbs irrelevant features in human salient information. We choose five tasks, namely Pixel-Taxi and four Atari games, to evaluate the performance and sample efficiency of this approach. We show that our method significantly outperforms methods leveraging human explanation that are adapted from supervised learning, and Human-in-the-loop RL baselines that only …
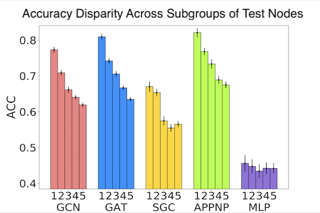
Despite enormous successful applications of graph neural networks (GNNs), theoretical understanding of their generalization ability, especially for node-level tasks where data are not independent and identically-distributed (IID), has been sparse. The theoretical investigation of the generalization performance is beneficial for understanding fundamental issues (such as fairness) of GNN models and designing better learning methods. In this paper, we present a novel PAC-Bayesian analysis for GNNs under a non-IID semi-supervised learning setup. Moreover, we analyze the generalization performances on different subgroups of unlabeled nodes, which allows us to further study an accuracy-(dis)parity-style (un)fairness of GNNs from a theoretical perspective. Under reasonable assumptions, we demonstrate that the distance between a test subgroup and the training set can be a key factor affecting the GNN performance on that subgroup, which calls special attention to the training node selection for fair learning. Experiments across multiple GNN models and datasets support our theoretical results.

In few-shot domain adaptation (FDA), classifiers for the target domain are trained with \emph{accessible} labeled data in the source domain (SD) and few labeled data in the target domain (TD). However, data usually contain private information in the current era, e.g., data distributed on personal phones. Thus, the private data will be leaked if we directly access data in SD to train a target-domain classifier (required by FDA methods). In this paper, to prevent privacy leakage in SD, we consider a very challenging problem setting, where the classifier for the TD has to be trained using few labeled target data and a well-trained SD classifier, named few-shot hypothesis adaptation (FHA). In FHA, we cannot access data in SD, as a result, the private information in SD will be protected well. To this end, we propose a target-oriented hypothesis adaptation network (TOHAN) to solve the FHA problem, where we generate highly-compatible unlabeled data (i.e., an intermediate domain) to help train a target-domain classifier. TOHAN maintains two deep networks simultaneously, in which one focuses on learning an intermediate domain and the other takes care of the intermediate-to-target distributional adaptation and the target-risk minimization. Experimental results show that TOHAN outperforms competitive baselines significantly.
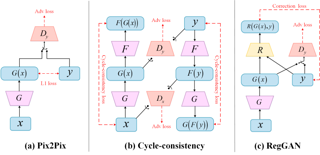
Supervised Pix2Pix and unsupervised Cycle-consistency are two modes that dominate the field of medical image-to-image translation. However, neither modes are ideal. The Pix2Pix mode has excellent performance. But it requires paired and well pixel-wise aligned images, which may not always be achievable due to respiratory motion or anatomy change between times that paired images are acquired. The Cycle-consistency mode is less stringent with training data and works well on unpaired or misaligned images. But its performance may not be optimal. In order to break the dilemma of the existing modes, we propose a new unsupervised mode called RegGAN for medical image-to-image translation. It is based on the theory of "loss-correction". In RegGAN, the misaligned target images are considered as noisy labels and the generator is trained with an additional registration network to fit the misaligned noise distribution adaptively. The goal is to search for the common optimal solution to both image-to-image translation and registration tasks. We incorporated RegGAN into a few state-of-the-art image-to-image translation methods and demonstrated that RegGAN could be easily combined with these methods to improve their performances. Such as a simple CycleGAN in our mode surpasses latest NICEGAN even though using less network parameters. Based on our …
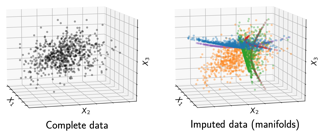
How to learn a good predictor on data with missing values? Most efforts focus on first imputing as well as possible and second learning on the completed data to predict the outcome. Yet, this widespread practice has no theoretical grounding. Here we show that for almost all imputation functions, an impute-then-regress procedure with a powerful learner is Bayes optimal. This result holds for all missing-values mechanisms, in contrast with the classic statistical results that require missing-at-random settings to use imputation in probabilistic modeling. Moreover, it implies that perfect conditional imputation is not needed for good prediction asymptotically. In fact, we show that on perfectly imputed data the best regression function will generally be discontinuous, which makes it hard to learn. Crafting instead the imputation so as to leave the regression function unchanged simply shifts the problem to learning discontinuous imputations. Rather, we suggest that it is easier to learn imputation and regression jointly. We propose such a procedure, adapting NeuMiss, a neural network capturing the conditional links across observed and unobserved variables whatever the missing-value pattern. Our experiments confirm that joint imputation and regression through NeuMiss is better than various two step procedures in a finite-sample regime.
In the fixed budget thresholding bandit problem, an algorithm sequentially allocates a budgeted number of samples to different distributions. It then predicts whether the mean of each distribution is larger or lower than a given threshold. We introduce a large family of algorithms (containing most existing relevant ones), inspired by the Frank-Wolfe algorithm, and provide a thorough yet generic analysis of their performance. This allowed us to construct new explicit algorithms, for a broad class of problems, whose losses are within a small constant factor of the non-adaptive oracle ones. Quite interestingly, we observed that adaptive methodsempirically greatly out-perform non-adaptive oracles, an uncommon behavior in standard online learning settings, such as regret minimization. We explain this surprising phenomenon on an insightful toy problem.
Features extracted from deep layers of classification networks are widely used as image descriptors. Here, we exploit an unexplored property of these features: their internal dissimilarity. While small image patches are known to have similar statistics across image scales, it turns out that the internal distribution of deep features varies distinctively between scales. We show how this deep self dissimilarity (DSD) property can be used as a powerful visual fingerprint. Particularly, we illustrate that full-reference and no-reference image quality measures derived from DSD are highly correlated with human preference. In addition, incorporating DSD as a loss function in training of image restoration networks, leads to results that are at least as photo-realistic as those obtained by GAN based methods, while not requiring adversarial training.
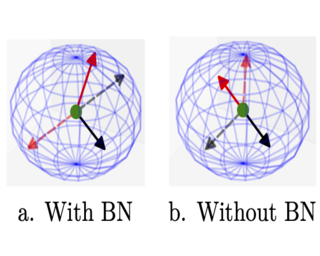
This paper underlines an elegant property of batch-normalization (BN): Successive batch normalizations with random linear updates make samples increasingly orthogonal. We establish a non-asymptotic characterization of the interplay between depth, width, and the orthogonality of deep representations. More precisely, we prove, under a mild assumption, the deviation of the representations from orthogonality rapidly decays with depth up to a term inversely proportional to the network width. This result has two main theoretical and practical implications: 1) Theoretically, as the depth grows, the distribution of the outputs contracts to a Wasserstein-2 ball around an isotropic normal distribution. Furthermore, the radius of this Wasserstein ball shrinks with the width of the network. 2) Practically, the orthogonality of the representations directly influences the performance of stochastic gradient descent (SGD). When representations are initially aligned, we observe SGD wastes many iterations to disentangle representations before the classification. Nevertheless, we experimentally show that starting optimization from orthogonal representations is sufficient to accelerate SGD, with no need for BN.
Pruning the weights of randomly initialized neural networks plays an important role in the context of lottery ticket hypothesis. Ramanujan et al. (2020) empirically showed that only pruning the weights can achieve remarkable performance instead of optimizing the weight values. However, to achieve the same level of performance as the weight optimization, the pruning approach requires more parameters in the networks before pruning and thus more memory space. To overcome this parameter inefficiency, we introduce a novel framework to prune randomly initialized neural networks with iteratively randomizing weight values (IteRand). Theoretically, we prove an approximation theorem in our framework, which indicates that the randomizing operations are provably effective to reduce the required number of the parameters. We also empirically demonstrate the parameter efficiency in multiple experiments on CIFAR-10 and ImageNet.
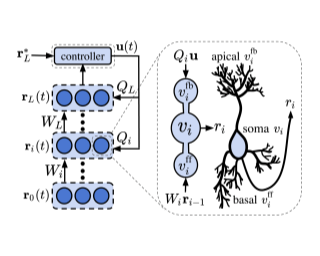
The success of deep learning sparked interest in whether the brain learns by using similar techniques for assigning credit to each synaptic weight for its contribution to the network output. However, the majority of current attempts at biologically-plausible learning methods are either non-local in time, require highly specific connectivity motifs, or have no clear link to any known mathematical optimization method. Here, we introduce Deep Feedback Control (DFC), a new learning method that uses a feedback controller to drive a deep neural network to match a desired output target and whose control signal can be used for credit assignment. The resulting learning rule is fully local in space and time and approximates Gauss-Newton optimization for a wide range of feedback connectivity patterns. To further underline its biological plausibility, we relate DFC to a multi-compartment model of cortical pyramidal neurons with a local voltage-dependent synaptic plasticity rule, consistent with recent theories of dendritic processing. By combining dynamical system theory with mathematical optimization theory, we provide a strong theoretical foundation for DFC that we corroborate with detailed results on toy experiments and standard computer-vision benchmarks.
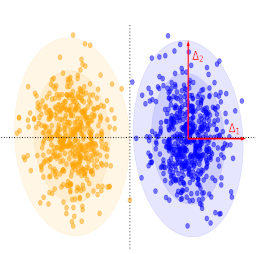
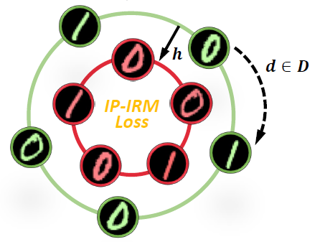
A good visual representation is an inference map from observations (images) to features (vectors) that faithfully reflects the hidden modularized generative factors (semantics). In this paper, we formulate the notion of "good" representation from a group-theoretic view using Higgins' definition of disentangled representation, and show that existing Self-Supervised Learning (SSL) only disentangles simple augmentation features such as rotation and colorization, thus unable to modularize the remaining semantics. To break the limitation, we propose an iterative SSL algorithm: Iterative Partition-based Invariant Risk Minimization (IP-IRM), which successfully grounds the abstract semantics and the group acting on them into concrete contrastive learning. At each iteration, IP-IRM first partitions the training samples into two subsets that correspond to an entangled group element. Then, it minimizes a subset-invariant contrastive loss, where the invariance guarantees to disentangle the group element. We prove that IP-IRM converges to a fully disentangled representation and show its effectiveness on various benchmarks. Codes are available at https://github.com/Wangt-CN/IP-IRM.
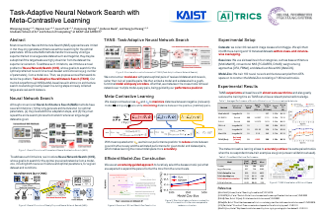
Most conventional Neural Architecture Search (NAS) approaches are limited in that they only generate architectures without searching for the optimal parameters. While some NAS methods handle this issue by utilizing a supernet trained on a large-scale dataset such as ImageNet, they may be suboptimal if the target tasks are highly dissimilar from the dataset the supernet is trained on. To address such limitations, we introduce a novel problem of Neural Network Search (NNS), whose goal is to search for the optimal pretrained network for a novel dataset and constraints (e.g. number of parameters), from a model zoo. Then, we propose a novel framework to tackle the problem, namely Task-Adaptive Neural Network Search (TANS). Given a model-zoo that consists of network pretrained on diverse datasets, we use a novel amortized meta-learning framework to learn a cross-modal latent space with contrastive loss, to maximize the similarity between a dataset and a high-performing network on it, and minimize the similarity between irrelevant dataset-network pairs. We validate the effectiveness and efficiency of our method on ten real-world datasets, against existing NAS/AutoML baselines. The results show that our method instantly retrieves networks that outperform models obtained with the baselines with significantly fewer training steps to …

Reliable yet efficient evaluation of generalisation performance of a proposed architecture is crucial to the success of neural architecture search (NAS). Traditional approaches face a variety of limitations: training each architecture to completion is prohibitively expensive, early stopped validation accuracy may correlate poorly with fully trained performance, and model-based estimators require large training sets. We instead propose to estimate the final test performance based on a simple measure of training speed. Our estimator is theoretically motivated by the connection between generalisation and training speed, and is also inspired by the reformulation of a PAC-Bayes bound under the Bayesian setting. Our model-free estimator is simple, efficient, and cheap to implement, and does not require hyperparameter-tuning or surrogate training before deployment. We demonstrate on various NAS search spaces that our estimator consistently outperforms other alternatives in achieving better correlation with the true test performance rankings. We further show that our estimator can be easily incorporated into both query-based and one-shot NAS methods to improve the speed or quality of the search.
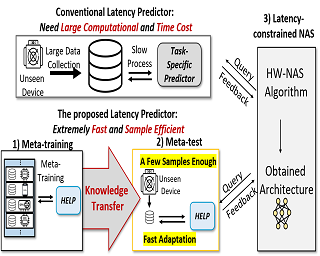
For deployment, neural architecture search should be hardware-aware, in order to satisfy the device-specific constraints (e.g., memory usage, latency and energy consumption) and enhance the model efficiency. Existing methods on hardware-aware NAS collect a large number of samples (e.g., accuracy and latency) from a target device, either builds a lookup table or a latency estimator. However, such approach is impractical in real-world scenarios as there exist numerous devices with different hardware specifications, and collecting samples from such a large number of devices will require prohibitive computational and monetary cost. To overcome such limitations, we propose Hardware-adaptive Efficient Latency Predictor (HELP), which formulates the device-specific latency estimation problem as a meta-learning problem, such that we can estimate the latency of a model's performance for a given task on an unseen device with a few samples. To this end, we introduce novel hardware embeddings to embed any devices considering them as black-box functions that output latencies, and meta-learn the hardware-adaptive latency predictor in a device-dependent manner, using the hardware embeddings. We validate the proposed HELP for its latency estimation performance on unseen platforms, on which it achieves high estimation performance with as few as 10 measurement samples, outperforming all relevant baselines. We …
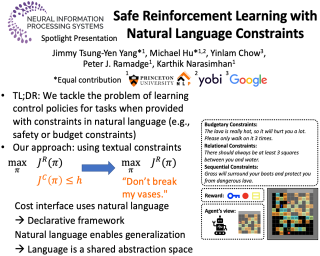
While safe reinforcement learning (RL) holds great promise for many practical applications like robotics or autonomous cars, current approaches require specifying constraints in mathematical form. Such specifications demand domain expertise, limiting the adoption of safe RL. In this paper, we propose learning to interpret natural language constraints for safe RL. To this end, we first introduce HAZARDWORLD, a new multi-task benchmark that requires an agent to optimize reward while not violating constraints specified in free-form text. We then develop an agent with a modular architecture that can interpret and adhere to such textual constraints while learning new tasks. Our model consists of (1) a constraint interpreter that encodes textual constraints into spatial and temporal representations of forbidden states, and (2) a policy network that uses these representations to produce a policy achieving minimal constraint violations during training. Across different domains in HAZARDWORLD, we show that our method achieves higher rewards (up to11x) and fewer constraint violations (by 1.8x) compared to existing approaches. However, in terms of absolute performance, HAZARDWORLD still poses significant challenges for agents to learn efficiently, motivating the need for future work.
The interplay between exploration and exploitation in competitive multi-agent learning is still far from being well understood. Motivated by this, we study smooth Q-learning, a prototypical learning model that explicitly captures the balance between game rewards and exploration costs. We show that Q-learning always converges to the unique quantal-response equilibrium (QRE), the standard solution concept for games under bounded rationality, in weighted zero-sum polymatrix games with heterogeneous learning agents using positive exploration rates. Complementing recent results about convergence in weighted potential games [16,34], we show that fast convergence of Q-learning in competitive settings obtains regardless of the number of agents and without any need for parameter fine-tuning. As showcased by our experiments in network zero-sum games, these theoretical results provide the necessary guarantees for an algorithmic approach to the currently open problem of equilibrium selection in competitive multi-agent settings.
Recent works on Bayesian neural networks (BNNs) have highlighted the need to better understand the implications of using Gaussian priors in combination with the compositional structure of the network architecture. Similar in spirit to the kind of analysis that has been developed to devise better initialization schemes for neural networks (cf. He- or Xavier initialization), we derive a precise characterization of the prior predictive distribution of finite-width ReLU networks with Gaussian weights.While theoretical results have been obtained for their heavy-tailedness,the full characterization of the prior predictive distribution (i.e. its density, CDF and moments), remained unknown prior to this work. Our analysis, based on the Meijer-G function, allows us to quantify the influence of architectural choices such as the width or depth of the network on the resulting shape of the prior predictive distribution. We also formally connect our results to previous work in the infinite width setting, demonstrating that the moments of the distribution converge to those of a normal log-normal mixture in the infinite depth limit. Finally, our results provide valuable guidance on prior design: for instance, controlling the predictive variance with depth- and width-informed priors on the weights of the network.
Motivated by the consideration of fairly sharing the cost of exploration between multiple groups in learning problems, we develop the Nash bargaining solution in the context of multi-armed bandits. Specifically, the 'grouped' bandit associated with any multi-armed bandit problem associates, with each time step, a single group from some finite set of groups. The utility gained by a given group under some learning policy is naturally viewed as the reduction in that group's regret relative to the regret that group would have incurred 'on its own'. We derive policies that yield the Nash bargaining solution relative to the set of incremental utilities possible under any policy. We show that on the one hand, the 'price of fairness' under such policies is limited, while on the other hand, regret optimal policies are arbitrarily unfair under generic conditions. Our theoretical development is complemented by a case study on contextual bandits for warfarin dosing where we are concerned with the cost of exploration across multiple races and age groups.
Topic model evaluation, like evaluation of other unsupervised methods, can be contentious. However, the field has coalesced around automated estimates of topic coherence, which rely on the frequency of word co-occurrences in a reference corpus. Contemporary neural topic models surpass classical ones according to these metrics. At the same time, topic model evaluation suffers from a validation gap: automated coherence, developed for classical models, has not been validated using human experimentation for neural models. In addition, a meta-analysis of topic modeling literature reveals a substantial standardization gap in automated topic modeling benchmarks. To address the validation gap, we compare automated coherence with the two most widely accepted human judgment tasks: topic rating and word intrusion. To address the standardization gap, we systematically evaluate a dominant classical model and two state-of-the-art neural models on two commonly used datasets. Automated evaluations declare a winning model when corresponding human evaluations do not, calling into question the validity of fully automatic evaluations independent of human judgments.
We derive a novel information-theoretic analysis of the generalization property of meta-learning algorithms. Concretely, our analysis proposes a generic understanding in both the conventional learning-to-learn framework \citep{amit2018meta} and the modern model-agnostic meta-learning (MAML) algorithms \citep{finn2017model}.Moreover, we provide a data-dependent generalization bound for the stochastic variant of MAML, which is \emph{non-vacuous} for deep few-shot learning. As compared to previous bounds that depend on the square norms of gradients, empirical validations on both simulated data and a well-known few-shot benchmark show that our bound is orders of magnitude tighter in most conditions.
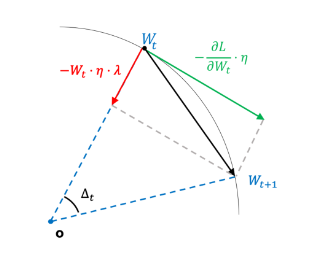
In this paper, we comprehensively reveal the learning dynamics of normalized neural network using Stochastic Gradient Descent (with momentum) and Weight Decay (WD), named as Spherical Motion Dynamics (SMD). Most related works focus on studying behavior of effective learning rate" inequilibrium" state, i.e. assuming weight norm remains unchanged. However, their discussion on why this equilibrium can be reached is either absent or less convincing. Our work directly explores the cause of equilibrium, as a special state of SMD. Specifically, 1) we introduce the assumptions that can lead to equilibrium state in SMD, and prove equilibrium can be reached in a linear rate regime under given assumptions; 2) we propose ``angular update" as a substitute for effective learning rate to depict the state of SMD, and derive the theoretical value of angular update in equilibrium state; 3) we verify our assumptions and theoretical results on various large-scale computer vision tasks including ImageNet and MSCOCO with standard settings. Experiment results show our theoretical findings agree well with empirical observations. We also show that the behavior of angular update in SMD can produce interesting effect to the optimization of neural network in practice.
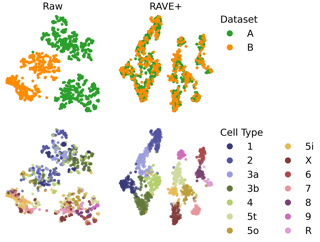
Integrating data from multiple experiments is common practice in systems neuroscience but it requires inter-experimental variability to be negligible compared to the biological signal of interest. This requirement is rarely fulfilled; systematic changes between experiments can drastically affect the outcome of complex analysis pipelines. Modern machine learning approaches designed to adapt models across multiple data domains offer flexible ways of removing inter-experimental variability where classical statistical methods often fail. While applications of these methods have been mostly limited to single-cell genomics, in this work, we develop a theoretical framework for domain adaptation in systems neuroscience. We implement this in an adversarial optimization scheme that removes inter-experimental variability while preserving the biological signal. We compare our method to previous approaches on a large-scale dataset of two-photon imaging recordings of retinal bipolar cell responses to visual stimuli. This dataset provides a unique benchmark as it contains biological signal from well-defined cell types that is obscured by large inter-experimental variability. In a supervised setting, we compare the generalization performance of cell type classifiers across experiments, which we validate with anatomical cell type distributions from electron microscopy data. In an unsupervised setting, we remove inter-experimental variability from the data which can then be fed …
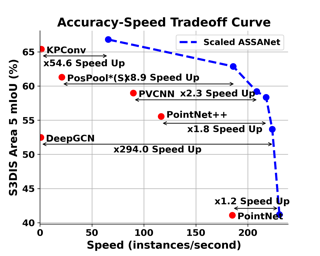
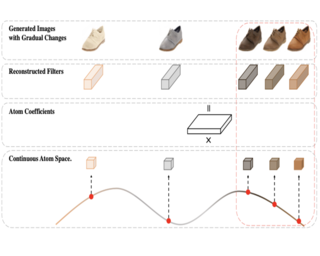
In this paper, we model the subspace of convolutional filters with a neural ordinary differential equation (ODE) to enable gradual changes in generated images. Decomposing convolutional filters over a set of filter atoms allows efficiently modeling and sampling from a subspace of high-dimensional filters. By further modeling filters atoms with a neural ODE, we show both empirically and theoretically that such introduced continuity can be propagated to the generated images, and thus achieves gradually evolved image generation. We support the proposed framework of image generation with continuous filter atoms using various experiments, including image-to-image translation and image generation conditioned on continuous labels. Without auxiliary network components and heavy supervision, the proposed continuous filter atoms allow us to easily manipulate the gradual change of generated images by controlling integration intervals of neural ordinary differential equation. This research sheds the light on using the subspace of network parameters to navigate the diverse appearance of image generation.
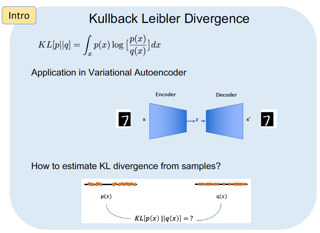
Estimating Kullback–Leibler (KL) divergence from samples of two distributions is essential in many machine learning problems. Variational methods using neural network discriminator have been proposed to achieve this task in a scalable manner. However, we noticed that most of these methods using neural network discriminators suffer from high fluctuations (variance) in estimates and instability in training. In this paper, we look at this issue from statistical learning theory and function space complexity perspective to understand why this happens and how to solve it. We argue that the cause of these pathologies is lack of control over the complexity of the neural network discriminator function and could be mitigated by controlling it. To achieve this objective, we 1) present a novel construction of the discriminator in the Reproducing Kernel Hilbert Space (RKHS), 2) theoretically relate the error probability bound of the KL estimates to the complexity of the discriminator in the RKHS space, 3) present a scalable way to control the complexity (RKHS norm) of the discriminator for a reliable estimation of KL divergence, and 4) prove the consistency of the proposed estimator. In three different applications of KL divergence -- estimation of KL, estimation of mutual information and Variational Bayes …
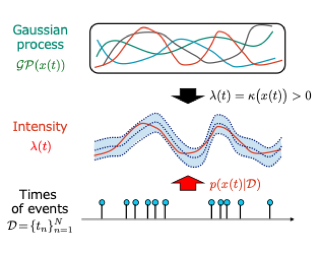
Gaussian Cox processes are widely-used point process models that use a Gaussian process to describe the Bayesian a priori uncertainty present in latent intensity functions. In this paper, we propose a novel Bayesian inference scheme for Gaussian Cox processes by exploiting a conceptually-intuitive {¥it path integral} formulation. The proposed scheme does not rely on domain discretization, scales linearly with the number of observed events, has a lower complexity than the state-of-the-art variational Bayesian schemes with respect to the number of inducing points, and is applicable to a wide range of Gaussian Cox processes with various types of link functions. Our scheme is especially beneficial under the multi-dimensional input setting, where the number of inducing points tends to be large. We evaluate our scheme on synthetic and real-world data, and show that it achieves comparable predictive accuracy while being tens of times faster than reference methods.
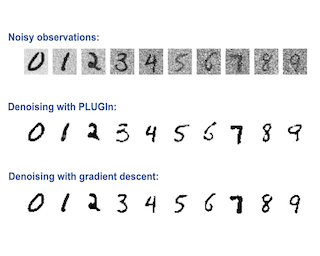

We introduce a novel perspective on Bayesian reinforcement learning (RL); whereas existing approaches infer a posterior over the transition distribution or Q-function, we characterise the uncertainty in the Bellman operator. Our Bayesian Bellman operator (BBO) framework is motivated by the insight that when bootstrapping is introduced, model-free approaches actually infer a posterior over Bellman operators, not value functions. In this paper, we use BBO to provide a rigorous theoretical analysis of model-free Bayesian RL to better understand its relationship to established frequentist RL methodologies. We prove that Bayesian solutions are consistent with frequentist RL solutions, even when approximate inference is used, and derive conditions for which convergence properties hold. Empirically, we demonstrate that algorithms derived from the BBO framework have sophisticated deep exploration properties that enable them to solve continuous control tasks at which state-of-the-art regularised actor-critic algorithms fail catastrophically.
Daniely and Schacham recently showed that gradient descent finds adversarial examples on random undercomplete two-layers ReLU neural networks. The term “undercomplete” refers to the fact that their proof only holds when the number of neurons is a vanishing fraction of the ambient dimension. We extend their result to the overcomplete case, where the number of neurons is larger than the dimension (yet also subexponential in the dimension). In fact we prove that a single step of gradient descent suffices. We also show this result for any subexponential width random neural network with smooth activation function.
We provide a setting and a general approach to fair online learning with stochastic sensitive and non-sensitive contexts.The setting is a repeated game between the Player and Nature, where at each stage both pick actions based on the contexts. Inspired by the notion of unawareness, we assume that the Player can only access the non-sensitive context before making a decision, while we discuss both cases of Nature accessing the sensitive contexts and Nature unaware of the sensitive contexts. Adapting Blackwell's approachability theory to handle the case of an unknown contexts' distribution, we provide a general necessary and sufficient condition for learning objectives to be compatible with some fairness constraints. This condition is instantiated on (group-wise) no-regret and (group-wise) calibration objectives, and on demographic parity as an additional constraint. When the objective is not compatible with the constraint, the provided framework permits to characterise the optimal trade-off between the two.
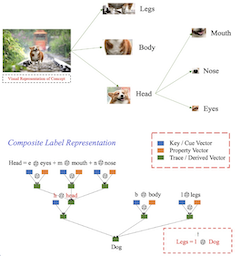
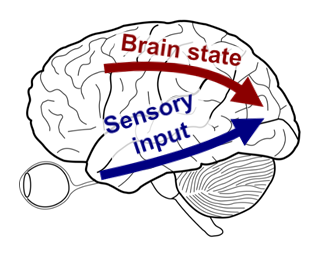
We present a joint deep neural system identification model for two major sources of neural variability: stimulus-driven and stimulus-conditioned fluctuations. To this end, we combine (1) state-of-the-art deep networks for stimulus-driven activity and (2) a flexible, normalizing flow-based generative model to capture the stimulus-conditioned variability including noise correlations. This allows us to train the model end-to-end without the need for sophisticated probabilistic approximations associated with many latent state models for stimulus-conditioned fluctuations. We train the model on the responses of thousands of neurons from multiple areas of the mouse visual cortex to natural images. We show that our model outperforms previous state-of-the-art models in predicting the distribution of neural population responses to novel stimuli, including shared stimulus-conditioned variability. Furthermore, it successfully learns known latent factors of the population responses that are related to behavioral variables such as pupil dilation, and other factors that vary systematically with brain area or retinotopic location. Overall, our model accurately accounts for two critical sources of neural variability while avoiding several complexities associated with many existing latent state models. It thus provides a useful tool for uncovering the interplay between different factors that contribute to variability in neural activity.
Recently, a new trend of exploring sparsity for accelerating neural network training has emerged, embracing the paradigm of training on the edge. This paper proposes a novel Memory-Economic Sparse Training (MEST) framework targeting for accurate and fast execution on edge devices. The proposed MEST framework consists of enhancements by Elastic Mutation (EM) and Soft Memory Bound (&S) that ensure superior accuracy at high sparsity ratios. Different from the existing works for sparse training, this current work reveals the importance of sparsity schemes on the performance of sparse training in terms of accuracy as well as training speed on real edge devices. On top of that, the paper proposes to employ data efficiency for further acceleration of sparse training. Our results suggest that unforgettable examples can be identified in-situ even during the dynamic exploration of sparsity masks in the sparse training process, and therefore can be removed for further training speedup on edge devices. Comparing with state-of-the-art (SOTA) works on accuracy, our MEST increases Top-1 accuracy significantly on ImageNet when using the same unstructured sparsity scheme. Systematical evaluation on accuracy, training speed, and memory footprint are conducted, where the proposed MEST framework consistently outperforms representative SOTA works. A reviewer strongly against …
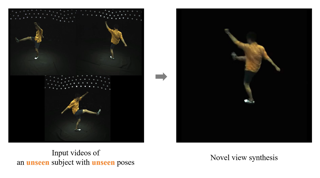
In this paper, we aim at synthesizing a free-viewpoint video of an arbitrary human performance using sparse multi-view cameras. Recently, several works have addressed this problem by learning person-specific neural radiance fields (NeRF) to capture the appearance of a particular human. In parallel, some work proposed to use pixel-aligned features to generalize radiance fields to arbitrary new scenes and objects. Adopting such generalization approaches to humans, however, is highly challenging due to the heavy occlusions and dynamic articulations of body parts. To tackle this, we propose Neural Human Performer, a novel approach that learns generalizable neural radiance fields based on a parametric human body model for robust performance capture. Specifically, we first introduce a temporal transformer that aggregates tracked visual features based on the skeletal body motion over time. Moreover, a multi-view transformer is proposed to perform cross-attention between the temporally-fused features and the pixel-aligned features at each time step to integrate observations on the fly from multiple views. Experiments on the ZJU-MoCap and AIST datasets show that our method significantly outperforms recent generalizable NeRF methods on unseen identities and poses.
Most existing neural architecture search (NAS) algorithms are dedicated to and evaluated by the downstream tasks, e.g., image classification in computer vision. However, extensive experiments have shown that, prominent neural architectures, such as ResNet in computer vision and LSTM in natural language processing, are generally good at extracting patterns from the input data and perform well on different downstream tasks. In this paper, we attempt to answer two fundamental questions related to NAS. (1) Is it necessary to use the performance of specific downstream tasks to evaluate and search for good neural architectures? (2) Can we perform NAS effectively and efficiently while being agnostic to the downstream tasks? To answer these questions, we propose a novel and generic NAS framework, termed Generic NAS (GenNAS). GenNAS does not use task-specific labels but instead adopts regression on a set of manually designed synthetic signal bases for architecture evaluation. Such a self-supervised regression task can effectively evaluate the intrinsic power of an architecture to capture and transform the input signal patterns, and allow more sufficient usage of training samples. Extensive experiments across 13 CNN search spaces and one NLP space demonstrate the remarkable efficiency of GenNAS using regression, in terms of both evaluating …

We introduce the task of spatially localizing narrated interactions in videos. Key to our approach is the ability to learn to spatially localize interactions with self-supervision on a large corpus of videos with accompanying transcribed narrations. To achieve this goal, we propose a multilayer cross-modal attention network that enables effective optimization of a contrastive loss during training. We introduce a divided strategy that alternates between computing inter- and intra-modal attention across the visual and natural language modalities, which allows effective training via directly contrasting the two modalities' representations. We demonstrate the effectiveness of our approach by self-training on the HowTo100M instructional video dataset and evaluating on a newly collected dataset of localized described interactions in the YouCook2 dataset. We show that our approach outperforms alternative baselines, including shallow co-attention and full cross-modal attention. We also apply our approach to grounding phrases in images with weak supervision on Flickr30K and show that stacking multiple attention layers is effective and, when combined with a word-to-region loss, achieves state of the art on recall-at-one and pointing hand accuracies.
Deep ensembles have recently gained popularity in the deep learning community for their conceptual simplicity and efficiency. However, maintaining functional diversity between ensemble members that are independently trained with gradient descent is challenging. This can lead to pathologies when adding more ensemble members, such as a saturation of the ensemble performance, which converges to the performance of a single model. Moreover, this does not only affect the quality of its predictions, but even more so the uncertainty estimates of the ensemble, and thus its performance on out-of-distribution data. We hypothesize that this limitation can be overcome by discouraging different ensemble members from collapsing to the same function. To this end, we introduce a kernelized repulsive term in the update rule of the deep ensembles. We show that this simple modification not only enforces and maintains diversity among the members but, even more importantly, transforms the maximum a posteriori inference into proper Bayesian inference. Namely, we show that the training dynamics of our proposed repulsive ensembles follow a Wasserstein gradient flow of the KL divergence with the true posterior. We study repulsive terms in weight and function space and empirically compare their performance to standard ensembles and Bayesian baselines on synthetic …

Recent blind super-resolution (SR) methods typically consist of two branches, one for degradation prediction and the other for conditional restoration. However, our experiments show that a one-branch network can achieve comparable performance to the two-branch scheme. Then we wonder: how can one-branch networks automatically learn to distinguish degradations? To find the answer, we propose a new diagnostic tool -- Filter Attribution method based on Integral Gradient (FAIG). Unlike previous integral gradient methods, our FAIG aims at finding the most discriminative filters instead of input pixels/features for degradation removal in blind SR networks. With the discovered filters, we further develop a simple yet effective method to predict the degradation of an input image. Based on FAIG, we show that, in one-branch blind SR networks, 1) we could find a very small number of (1%) discriminative filters for each specific degradation; 2) The weights, locations and connections of the discovered filters are all important to determine the specific network function. 3) The task of degradation prediction can be implicitly realized by these discriminative filters without explicit supervised learning. Our findings can not only help us better understand network behaviors inside one-branch blind SR networks, but also provide guidance on designing more efficient …
Machine learning for understanding and editing source code has recently attracted significant interest, with many developments in new models, new code representations, and new tasks.This proliferation can appear disparate and disconnected, making each approach seemingly unique and incompatible, thus obscuring the core machine learning challenges and contributions.In this work, we demonstrate that the landscape can be significantly simplified by taking a general approach of mapping a graph to a sequence of tokens and pointers.Our main result is to show that 16 recently published tasks of different shapes can be cast in this form, based on which a single model architecture achieves near or above state-of-the-art results on nearly all tasks, outperforming custom models like code2seq and alternative generic models like Transformers.This unification further enables multi-task learning and a series of cross-cutting experiments about the importance of different modeling choices for code understanding and repair tasks.The full framework, called PLUR, is easily extensible to more tasks, and will be open-sourced (https://github.com/google-research/plur).
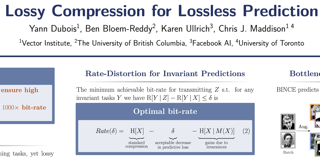
Most data is automatically collected and only ever "seen" by algorithms. Yet, data compressors preserve perceptual fidelity rather than just the information needed by algorithms performing downstream tasks. In this paper, we characterize the bit-rate required to ensure high performance on all predictive tasks that are invariant under a set of transformations, such as data augmentations. Based on our theory, we design unsupervised objectives for training neural compressors. Using these objectives, we train a generic image compressor that achieves substantial rate savings (more than 1000x on ImageNet) compared to JPEG on 8 datasets, without decreasing downstream classification performance.

We present neural radiance fields for rendering and temporal (4D) reconstruction of humans in motion (H-NeRF), as captured by a sparse set of cameras or even from a monocular video. Our approach combines ideas from neural scene representation, novel-view synthesis, and implicit statistical geometric human representations, coupled using novel loss functions. Instead of learning a radiance field with a uniform occupancy prior, we constrain it by a structured implicit human body model, represented using signed distance functions. This allows us to robustly fuse information from sparse views and generalize well beyond the poses or views observed in training. Moreover, we apply geometric constraints to co-learn the structure of the observed subject -- including both body and clothing -- and to regularize the radiance field to geometrically plausible solutions. Extensive experiments on multiple datasets demonstrate the robustness and the accuracy of our approach, its generalization capabilities significantly outside a small training set of poses and views, and statistical extrapolation beyond the observed shape.
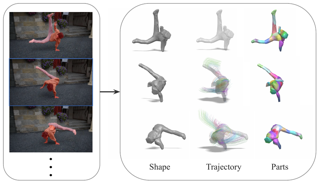
We introduce ViSER, a method for recovering articulated 3D shapes and dense3D trajectories from monocular videos. Previous work on high-quality reconstruction of dynamic 3D shapes typically relies on multiple camera views, strong category-specific priors, or 2D keypoint supervision. We show that none of these are required if one can reliably estimate long-range correspondences in a video, making use of only 2D object masks and two-frame optical flow as inputs. ViSER infers correspondences by matching 2D pixels to a canonical, deformable 3D mesh via video-specific surface embeddings that capture the pixel appearance of each surface point. These embeddings behave as a continuous set of keypoint descriptors defined over the mesh surface, which can be used to establish dense long-range correspondences across pixels. The surface embeddings are implemented as coordinate-based MLPs that are fit to each video via self-supervised losses.Experimental results show that ViSER compares favorably against prior work on challenging videos of humans with loose clothing and unusual poses as well as animals videos from DAVIS and YTVOS. Project page: viser-shape.github.io.
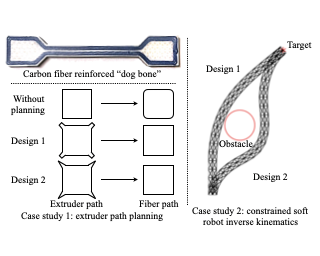
In design, fabrication, and control problems, we are often faced with the task of synthesis, in which we must generate an object or configuration that satisfies a set of constraints while maximizing one or more objective functions. The synthesis problem is typically characterized by a physical process in which many different realizations may achieve the goal. This many-to-one map presents challenges to the supervised learning of feed-forward synthesis, as the set of viable designs may have a complex structure. In addition, the non-differentiable nature of many physical simulations prevents efficient direct optimization. We address both of these problems with a two-stage neural network architecture that we may consider to be an autoencoder. We first learn the decoder: a differentiable surrogate that approximates the many-to-one physical realization process. We then learn the encoder, which maps from goal to design, while using the fixed decoder to evaluate the quality of the realization. We evaluate the approach on two case studies: extruder path planning in additive manufacturing and constrained soft robot inverse kinematics. We compare our approach to direct optimization of the design using the learned surrogate, and to supervised learning of the synthesis problem. We find that our approach produces higher quality …

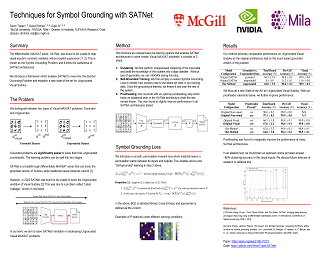
Many experts argue that the future of artificial intelligence is limited by the field’s ability to integrate symbolic logical reasoning into deep learning architectures. The recently proposed differentiable MAXSAT solver, SATNet, was a breakthrough in its capacity to integrate with a traditional neural network and solve visual reasoning problems. For instance, it can learn the rules of Sudoku purely from image examples. Despite its success, SATNet was shown to succumb to a key challenge in neurosymbolic systems known as the Symbol Grounding Problem: the inability to map visual inputs to symbolic variables without explicit supervision ("label leakage"). In this work, we present a self-supervised pre-training pipeline that enables SATNet to overcome this limitation, thus broadening the class of problems that SATNet architectures can solve to include datasets where no intermediary labels are available at all. We demonstrate that our method allows SATNet to attain full accuracy even with a harder problem setup that prevents any label leakage. We additionally introduce a proofreading method that further improves the performance of SATNet architectures, beating the state-of-the-art on Visual Sudoku.
Many probabilistic modeling problems in machine learning use gradient-based optimization in which the objective takes the form of an expectation. These problems can be challenging when the parameters to be optimized determine the probability distribution under which the expectation is being taken, as the na\"ive Monte Carlo procedure is not differentiable. Reparameterization gradients make it possible to efficiently perform optimization of these Monte Carlo objectives by transforming the expectation to be differentiable, but the approach is typically limited to distributions with simple forms and tractable normalization constants. Here we describe how to differentiate samples from slice sampling to compute \textit{slice sampling reparameterization gradients}, enabling a richer class of Monte Carlo objective functions to be optimized. Slice sampling is a Markov chain Monte Carlo algorithm for simulating samples from probability distributions; it only requires a density function that can be evaluated point-wise up to a normalization constant, making it applicable to a variety of inference problems and unnormalized models. Our approach is based on the observation that when the slice endpoints are known, the sampling path is a deterministic and differentiable function of the pseudo-random variables, since the algorithm is rejection-free. We evaluate the method on synthetic examples and apply it …
In the predict-then-optimize framework, the objective is to train a predictive model, mapping from environment features to parameters of an optimization problem, which maximizes decision quality when the optimization is subsequently solved. Recent work on decision-focused learning shows that embedding the optimization problem in the training pipeline can improve decision quality and help generalize better to unseen tasks compared to relying on an intermediate loss function for evaluating prediction quality. We study the predict-then-optimize framework in the context of sequential decision problems (formulated as MDPs) that are solved via reinforcement learning. In particular, we are given environment features and a set of trajectories from training MDPs, which we use to train a predictive model that generalizes to unseen test MDPs without trajectories. Two significant computational challenges arise in applying decision-focused learning to MDPs: (i) large state and action spaces make it infeasible for existing techniques to differentiate through MDP problems, and (ii) the high-dimensional policy space, as parameterized by a neural network, makes differentiating through a policy expensive. We resolve the first challenge by sampling provably unbiased derivatives to approximate and differentiate through optimality conditions, and the second challenge by using a low-rank approximation to the high-dimensional sample-based derivatives. We …

In imperfect-information games, subgame solving is significantly more challenging than in perfect-information games, but in the last few years, such techniques have been developed. They were the key ingredient to the milestone of superhuman play in no-limit Texas hold'em poker. Current subgame-solving techniques analyze the entire common-knowledge closure of the player's current information set, that is, the smallest set of nodes within which it is common knowledge that the current node lies. While this is acceptable in games like poker where the common-knowledge closure is relatively small, many practical games have more complex information structure, which renders the common-knowledge closure impractically large to enumerate or even reasonably approximate. We introduce an approach that overcomes this obstacle, by instead working with only low-order knowledge. Our approach allows an agent, upon arriving at an infoset, to basically prune any node that is no longer reachable, thereby massively reducing the game tree size relative to the common-knowledge subgame. We prove that, as is, our approach can increase exploitability compared to the blueprint strategy. However, we develop three avenues by which safety can be guaranteed. First, safety is guaranteed if the results of subgame solves are incorporated back into the blueprint. Second, we provide …
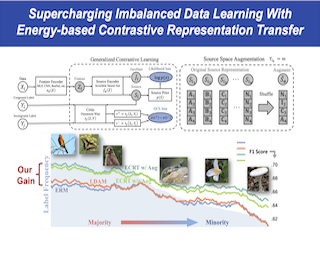
Dealing with severe class imbalance poses a major challenge for many real-world applications, especially when the accurate classification and generalization of minority classes are of primary interest.In computer vision and NLP, learning from datasets with long-tail behavior is a recurring theme, especially for naturally occurring labels. Existing solutions mostly appeal to sampling or weighting adjustments to alleviate the extreme imbalance, or impose inductive bias to prioritize generalizable associations. Here we take a novel perspective to promote sample efficiency and model generalization based on the invariance principles of causality. Our contribution posits a meta-distributional scenario, where the causal generating mechanism for label-conditional features is invariant across different labels. Such causal assumption enables efficient knowledge transfer from the dominant classes to their under-represented counterparts, even if their feature distributions show apparent disparities. This allows us to leverage a causal data augmentation procedure to enlarge the representation of minority classes. Our development is orthogonal to the existing imbalanced data learning techniques thus can be seamlessly integrated. The proposed approach is validated on an extensive set of synthetic and real-world tasks against state-of-the-art solutions.
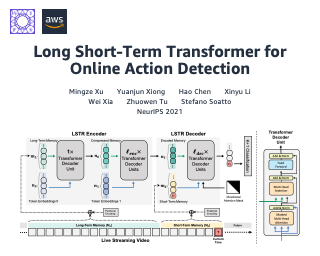
We present Long Short-term TRansformer (LSTR), a temporal modeling algorithm for online action detection, which employs a long- and short-term memory mechanism to model prolonged sequence data. It consists of an LSTR encoder that dynamically leverages coarse-scale historical information from an extended temporal window (e.g., 2048 frames spanning of up to 8 minutes), together with an LSTR decoder that focuses on a short time window (e.g., 32 frames spanning 8 seconds) to model the fine-scale characteristics of the data. Compared to prior work, LSTR provides an effective and efficient method to model long videos with fewer heuristics, which is validated by extensive empirical analysis. LSTR achieves state-of-the-art performance on three standard online action detection benchmarks, THUMOS'14, TVSeries, and HACS Segment. Code has been made available at: https://xumingze0308.github.io/projects/lstr.
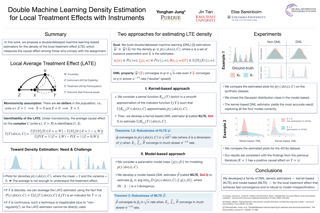
Local treatment effects are a common quantity found throughout the empirical sciences that measure the treatment effect among those who comply with what they are assigned. Most of the literature is focused on estimating the average of such quantity, which is called the ``local average treatment effect (LATE)'' [Imbens and Angrist, 1994]). In this work, we study how to estimate the density of the local treatment effect, which is naturally more informative than its average. Specifically, we develop two families of methods for this task, namely, kernel-smoothing and model-based approaches. The kernel-smoothing-based approach estimates the density through some smooth kernel functions. The model-based approach estimates the density by projecting it onto a finite-dimensional density class. For both approaches, we derive the corresponding double/debiased machine learning-based estimators [Chernozhukov et al., 2018]. We further study the asymptotic convergence rates of the estimators and show that they are robust to the biases in nuisance function estimation. The use of the proposed methods is illustrated through both synthetic and a real dataset called 401(k).
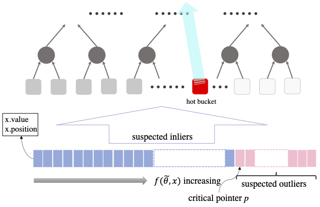
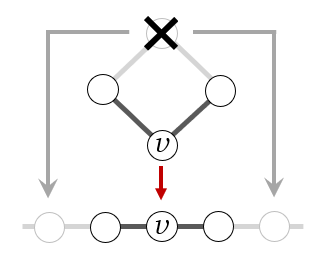
This paper studies Dropout Graph Neural Networks (DropGNNs), a new approach that aims to overcome the limitations of standard GNN frameworks. In DropGNNs, we execute multiple runs of a GNN on the input graph, with some of the nodes randomly and independently dropped in each of these runs. Then, we combine the results of these runs to obtain the final result. We prove that DropGNNs can distinguish various graph neighborhoods that cannot be separated by message passing GNNs. We derive theoretical bounds for the number of runs required to ensure a reliable distribution of dropouts, and we prove several properties regarding the expressive capabilities and limits of DropGNNs. We experimentally validate our theoretical findings on expressiveness. Furthermore, we show that DropGNNs perform competitively on established GNN benchmarks.
Existing observational approaches for learning human preferences, such as inverse reinforcement learning, usually make strong assumptions about the observability of the human's environment. However, in reality, people make many important decisions under uncertainty. To better understand preference learning in these cases, we study the setting of inverse decision theory (IDT), a previously proposed framework where a human is observed making non-sequential binary decisions under uncertainty. In IDT, the human's preferences are conveyed through their loss function, which expresses a tradeoff between different types of mistakes. We give the first statistical analysis of IDT, providing conditions necessary to identify these preferences and characterizing the sample complexity—the number of decisions that must be observed to learn the tradeoff the human is making to a desired precision. Interestingly, we show that it is actually easier to identify preferences when the decision problem is more uncertain. Furthermore, uncertain decision problems allow us to relax the unrealistic assumption that the human is an optimal decision maker but still identify their exact preferences; we give sample complexities in this suboptimal case as well. Our analysis contradicts the intuition that partial observability should make preference learning more difficult. It also provides a first step towards understanding and …
It is well known that vision classification models suffer from poor calibration in the face of data distribution shifts. In this paper, we take a geometric approach to this problem. We propose Geometric Sensitivity Decomposition (GSD) which decomposes the norm of a sample feature embedding and the angular similarity to a target classifier into an instance-dependent and an instance-independent com-ponent. The instance-dependent component captures the sensitive information about changes in the input while the instance-independent component represents the insensitive information serving solely to minimize the loss on the training dataset. Inspired by the decomposition, we analytically derive a simple extension to current softmax-linear models, which learns to disentangle the two components during training. On several common vision models, the disentangled model out-performs other calibration methods on standard calibration metrics in the face of out-of-distribution (OOD) data and corruption with significantly less complexity. Specifically, we surpass the current state of the art by 30.8% relative improvement on corrupted CIFAR100 in Expected Calibration Error.
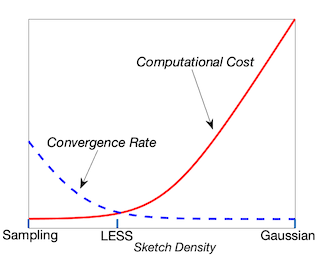
In second-order optimization, a potential bottleneck can be computing the Hessian matrix of the optimized function at every iteration. Randomized sketching has emerged as a powerful technique for constructing estimates of the Hessian which can be used to perform approximate Newton steps. This involves multiplication by a random sketching matrix, which introduces a trade-off between the computational cost of sketching and the convergence rate of the optimization. A theoretically desirable but practically much too expensive choice is to use a dense Gaussian sketching matrix, which produces unbiased estimates of the exact Newton step and offers strong problem-independent convergence guarantees. We show that the Gaussian matrix can be drastically sparsified, substantially reducing the computational cost, without affecting its convergence properties in any way. This approach, called Newton-LESS, is based on a recently introduced sketching technique: LEverage Score Sparsified (LESS) embeddings. We prove that Newton-LESS enjoys nearly the same problem-independent local convergence rate as Gaussian embeddings for a large class of functions. In particular, this leads to a new state-of-the-art convergence result for an iterative least squares solver. Finally, we substantially extend LESS embeddings to include uniformly sparsified random sign matrices which can be implemented efficiently and perform well in numerical experiments.
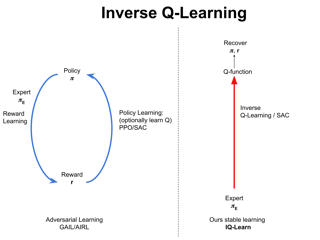
In many sequential decision-making problems (e.g., robotics control, game playing, sequential prediction), human or expert data is available containing useful information about the task. However, imitation learning (IL) from a small amount of expert data can be challenging in high-dimensional environments with complex dynamics. Behavioral cloning is a simple method that is widely used due to its simplicity of implementation and stable convergence but doesn't utilize any information involving the environment’s dynamics. Many existing methods that exploit dynamics information are difficult to train in practice due to an adversarial optimization process over reward and policy approximators or biased, high variance gradient estimators. We introduce a method for dynamics-aware IL which avoids adversarial training by learning a single Q-function, implicitly representing both reward and policy. On standard benchmarks, the implicitly learned rewards show a high positive correlation with the ground-truth rewards, illustrating our method can also be used for inverse reinforcement learning (IRL). Our method, Inverse soft-Q learning (IQ-Learn) obtains state-of-the-art results in offline and online imitation learning settings, significantly outperforming existing methods both in the number of required environment interactions and scalability in high-dimensional spaces, often by more than 3x.
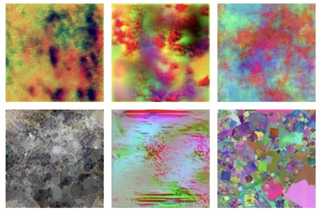
Current vision systems are trained on huge datasets, and these datasets come with costs: curation is expensive, they inherit human biases, and there are concerns over privacy and usage rights. To counter these costs, interest has surged in learning from cheaper data sources, such as unlabeled images. In this paper we go a step further and ask if we can do away with real image datasets entirely, instead learning from procedural noise processes. We investigate a suite of image generation models that produce images from simple random processes. These are then used as training data for a visual representation learner with a contrastive loss. In particular, we study statistical image models, randomly initialized deep generative models, and procedural graphics models.Our findings show that it is important for the noise to capture certain structural properties of real data but that good performance can be achieved even with processes that are far from realistic. We also find that diversity is a key property to learn good representations.
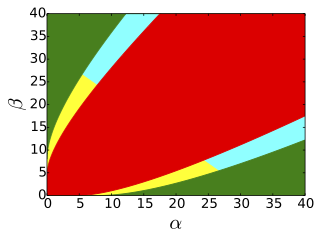
We consider the task of learning latent community structure from multiple correlated networks. First, we study the problem of learning the latent vertex correspondence between two edge-correlated stochastic block models, focusing on the regime where the average degree is logarithmic in the number of vertices. We derive the precise information-theoretic threshold for exact recovery: above the threshold there exists an estimator that outputs the true correspondence with probability close to 1, while below it no estimator can recover the true correspondence with probability bounded away from 0. As an application of our results, we show how one can exactly recover the latent communities using \emph{multiple} correlated graphs in parameter regimes where it is information-theoretically impossible to do so using just a single graph.
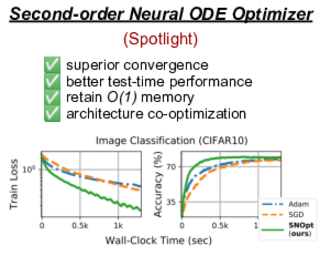
We propose a novel second-order optimization framework for training the emerging deep continuous-time models, specifically the Neural Ordinary Differential Equations (Neural ODEs). Since their training already involves expensive gradient computation by solving a backward ODE, deriving efficient second-order methods becomes highly nontrivial. Nevertheless, inspired by the recent Optimal Control (OC) interpretation of training deep networks, we show that a specific continuous-time OC methodology, called Differential Programming, can be adopted to derive backward ODEs for higher-order derivatives at the same O(1) memory cost. We further explore a low-rank representation of the second-order derivatives and show that it leads to efficient preconditioned updates with the aid of Kronecker-based factorization. The resulting method – named SNOpt – converges much faster than first-order baselines in wall-clock time, and the improvement remains consistent across various applications, e.g. image classification, generative flow, and time-series prediction. Our framework also enables direct architecture optimization, such as the integration time of Neural ODEs, with second-order feedback policies, strengthening the OC perspective as a principled tool of analyzing optimization in deep learning. Our code is available at https://github.com/ghliu/snopt.
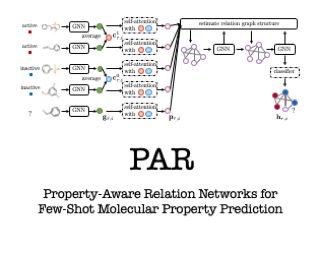
Molecular property prediction plays a fundamental role in drug discovery to identify candidate molecules with target properties. However, molecular property prediction is essentially a few-shot problem, which makes it hard to use regular machine learning models. In this paper, we propose Property-Aware Relation networks (PAR) to handle this problem. In comparison to existing works, we leverage the fact that both relevant substructures and relationships among molecules change across different molecular properties. We first introduce a property-aware embedding function to transform the generic molecular embeddings to substructure-aware space relevant to the target property. Further, we design an adaptive relation graph learning module to jointly estimate molecular relation graph and refine molecular embeddings w.r.t. the target property, such that the limited labels can be effectively propagated among similar molecules. We adopt a meta-learning strategy where the parameters are selectively updated within tasks in order to model generic and property-aware knowledge separately. Extensive experiments on benchmark molecular property prediction datasets show that PAR consistently outperforms existing methods and can obtain property-aware molecular embeddings and model molecular relation graph properly.
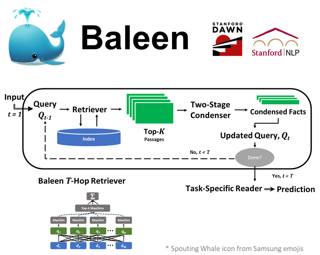
Multi-hop reasoning (i.e., reasoning across two or more documents) is a key ingredient for NLP models that leverage large corpora to exhibit broad knowledge. To retrieve evidence passages, multi-hop models must contend with a fast-growing search space across the hops, represent complex queries that combine multiple information needs, and resolve ambiguity about the best order in which to hop between training passages. We tackle these problems via Baleen, a system that improves the accuracy of multi-hop retrieval while learning robustly from weak training signals in the many-hop setting. To tame the search space, we propose condensed retrieval, a pipeline that summarizes the retrieved passages after each hop into a single compact context. To model complex queries, we introduce a focused late interaction retriever that allows different parts of the same query representation to match disparate relevant passages. Lastly, to infer the hopping dependencies among unordered training passages, we devise latent hop ordering, a weak-supervision strategy in which the trained retriever itself selects the sequence of hops. We evaluate Baleen on retrieval for two-hop question answering and many-hop claim verification, establishing state-of-the-art performance.
Several queries and scores have recently been proposed to explain individual predictions over ML models. Examples include queries based on “anchors”, which are parts of an instance that are sufficient to justify its classification, and “feature-perturbation” scores such as SHAP. Given the need for flexible, reliable, and easy-to-apply interpretability methods for ML models, we foresee the need for developing declarative languages to naturally specify different explainability queries. We do this in a principled way by rooting such a language in a logic called FOIL, which allows for expressing many simple but important explainability queries, and might serve as a core for more expressive interpretability languages. We study the computational complexity of FOIL queries over two classes of ML models often deemed to be easily interpretable: decision trees and more general decision diagrams. Since the number of possible inputs for an ML model is exponential in its dimension, tractability of the FOIL evaluation problem is delicate but can be achieved by either restricting the structure of the models, or the fragment of FOIL being evaluated. We also present a prototype implementation of FOIL wrapped in a high-level declarative language and perform experiments showing that such a language can be used in …
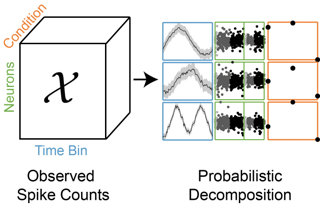
The firing of neural populations is coordinated across cells, in time, and across experimentalconditions or repeated experimental trials; and so a full understanding of the computationalsignificance of neural responses must be based on a separation of these different contributions tostructured activity.Tensor decomposition is an approach to untangling the influence of multiple factors in data that iscommon in many fields. However, despite some recent interest in neuroscience, wider applicabilityof the approach is hampered by the lack of a full probabilistic treatment allowing principledinference of a decomposition from non-Gaussian spike-count data.Here, we extend the Pólya-Gamma (PG) augmentation, previously used in sampling-based Bayesianinference, to implement scalable variational inference in non-conjugate spike-count models.Using this new approach, we develop techniques related to automatic relevance determination to inferthe most appropriate tensor rank, as well as to incorporate priors based on known brain anatomy suchas the segregation of cell response properties by brain area.We apply the model to neural recordings taken under conditions of visual-vestibular sensoryintegration, revealing how the encoding of self- and visual-motion signals is modulated by thesensory information available to the animal.
We present a novel neural surface reconstruction method, called NeuS, for reconstructing objects and scenes with high fidelity from 2D image inputs. Existing neural surface reconstruction approaches, such as DVR [Niemeyer et al., 2020] and IDR [Yariv et al., 2020], require foreground mask as supervision, easily get trapped in local minima, and therefore struggle with the reconstruction of objects with severe self-occlusion or thin structures. Meanwhile, recent neural methods for novel view synthesis, such as NeRF [Mildenhall et al., 2020] and its variants, use volume rendering to produce a neural scene representation with robustness of optimization, even for highly complex objects. However, extracting high-quality surfaces from this learned implicit representation is difficult because there are not sufficient surface constraints in the representation. In NeuS, we propose to represent a surface as the zero-level set of a signed distance function (SDF) and develop a new volume rendering method to train a neural SDF representation. We observe that the conventional volume rendering method causes inherent geometric errors (i.e. bias) for surface reconstruction, and therefore propose a new formulation that is free of bias in the first order of approximation, thus leading to more accurate surface reconstruction even without the mask supervision. Experiments …
This paper considers incremental few-shot learning, which requires a model to continually recognize new categories with only a few examples provided. Our study shows that existing methods severely suffer from catastrophic forgetting, a well-known problem in incremental learning, which is aggravated due to data scarcity and imbalance in the few-shot setting. Our analysis further suggests that to prevent catastrophic forgetting, actions need to be taken in the primitive stage -- the training of base classes instead of later few-shot learning sessions. Therefore, we propose to search for flat local minima of the base training objective function and then fine-tune the model parameters within the flat region on new tasks. In this way, the model can efficiently learn new classes while preserving the old ones. Comprehensive experimental results demonstrate that our approach outperforms all prior state-of-the-art methods and is very close to the approximate upper bound. The source code is available at https://github.com/moukamisama/F2M.
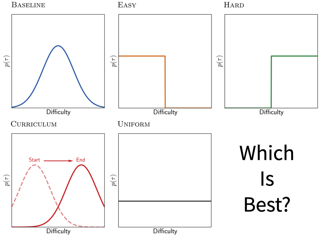
Episodic training is a core ingredient of few-shot learning to train models on tasks with limited labelled data. Despite its success, episodic training remains largely understudied, prompting us to ask the question: what is the best way to sample episodes? In this paper, we first propose a method to approximate episode sampling distributions based on their difficulty. Building on this method, we perform an extensive analysis and find that sampling uniformly over episode difficulty outperforms other sampling schemes, including curriculum and easy-/hard-mining. As the proposed sampling method is algorithm agnostic, we can leverage these insights to improve few-shot learning accuracies across many episodic training algorithms. We demonstrate the efficacy of our method across popular few-shot learning datasets, algorithms, network architectures, and protocols.
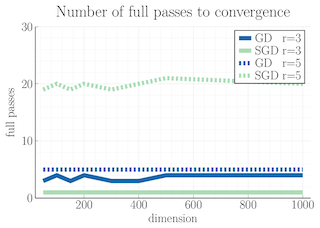
We study first-order optimization algorithms for computing the barycenter of Gaussian distributions with respect to the optimal transport metric. Although the objective is geodesically non-convex, Riemannian gradient descent empirically converges rapidly, in fact faster than off-the-shelf methods such as Euclidean gradient descent and SDP solvers. This stands in stark contrast to the best-known theoretical results, which depend exponentially on the dimension. In this work, we prove new geodesic convexity results which provide stronger control of the iterates, yielding a dimension-free convergence rate. Our techniques also enable the analysis of two related notions of averaging, the entropically-regularized barycenter and the geometric median, providing the first convergence guarantees for these problems.
Researchers often face data fusion problems, where multiple data sources are available, each capturing a distinct subset of variables. While problem formulations typically take the data as given, in practice, data acquisition can be an ongoing process. In this paper, we introduce the problem of deciding, at each time, which data source to sample from. Our goal is to estimate a given functional of the parameters of a probabilistic model as efficiently as possible. We propose online moment selection (OMS), a framework in which structural assumptions are encoded as moment conditions. The optimal action at each step depends, in part, on the very moments that identify the functional of interest. Our algorithms balance exploration with choosing the best action as suggested by estimated moments. We propose two selection strategies: (1) explore-then-commit (ETC) and (2) explore-then-greedy (ETG), proving that both achieve zero asymptotic regret as assessed by MSE. We instantiate our setup for average treatment effect estimation, where structural assumptions are given by a causal graph and data sources include subsets of mediators, confounders, and instrumental variables.
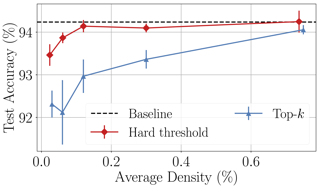
Pre-trained language models have been successful on text classification tasks, but are prone to learning spurious correlations from biased datasets, and are thus vulnerable when making inferences in a new domain. Prior work reveals such spurious patterns via post-hoc explanation algorithms which compute the importance of input features. Further, the model is regularized to align the importance scores with human knowledge, so that the unintended model behaviors are eliminated. However, such a regularization technique lacks flexibility and coverage, since only importance scores towards a pre-defined list of features are adjusted, while more complex human knowledge such as feature interaction and pattern generalization can hardly be incorporated. In this work, we propose to refine a learned language model for a target domain by collecting human-provided compositional explanations regarding observed biases. By parsing these explanations into executable logic rules, the human-specified refinement advice from a small set of explanations can be generalized to more training examples. We additionally introduce a regularization term allowing adjustments for both importance and interaction of features to better rectify model behavior. We demonstrate the effectiveness of the proposed approach on two text classification tasks by showing improved performance in target domain as well as improved model fairness …
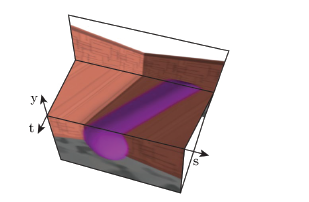
Inferring representations of 3D scenes from 2D observations is a fundamental problem of computer graphics, computer vision, and artificial intelligence. Emerging 3D-structured neural scene representations are a promising approach to 3D scene understanding. In this work, we propose a novel neural scene representation, Light Field Networks or LFNs, which represent both geometry and appearance of the underlying 3D scene in a 360-degree, four-dimensional light field parameterized via a neural implicit representation. Rendering a ray from an LFN requires only a single network evaluation, as opposed to hundreds of evaluations per ray for ray-marching or volumetric based renderers in 3D-structured neural scene representations. In the setting of simple scenes, we leverage meta-learning to learn a prior over LFNs that enables multi-view consistent light field reconstruction from as little as a single image observation. This results in dramatic reductions in time and memory complexity, and enables real-time rendering. The cost of storing a 360-degree light field via an LFN is two orders of magnitude lower than conventional methods such as the Lumigraph. Utilizing the analytical differentiability of neural implicit representations and a novel parameterization of light space, we further demonstrate the extraction of sparse depth maps from LFNs.
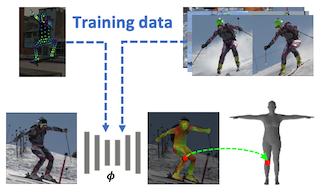
This paper presents a new end-to-end semi-supervised framework to learn a dense keypoint detector using unlabeled multiview images. A key challenge lies in finding the exact correspondences between the dense keypoints in multiple views since the inverse of the keypoint mapping can be neither analytically derived nor differentiated. This limits applying existing multiview supervision approaches used to learn sparse keypoints that rely on the exact correspondences. To address this challenge, we derive a new probabilistic epipolar constraint that encodes the two desired properties. (1) Soft correspondence: we define a matchability, which measures a likelihood of a point matching to the other image’s corresponding point, thus relaxing the requirement of the exact correspondences. (2) Geometric consistency: every point in the continuous correspondence fields must satisfy the multiview consistency collectively. We formulate a probabilistic epipolar constraint using a weighted average of epipolar errors through the matchability thereby generalizing the point-to-point geometric error to the field-to-field geometric error. This generalization facilitates learning a geometrically coherent dense keypoint detection model by utilizing a large number of unlabeled multiview images. Additionally, to prevent degenerative cases, we employ a distillation-based regularization by using a pretrained model. Finally, we design a new neural network architecture, made of …
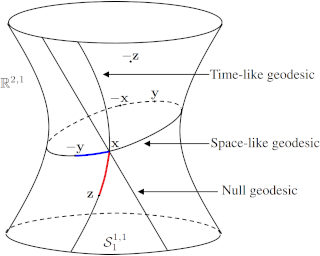
Riemannian space forms, such as the Euclidean space, sphere and hyperbolic space, are popular and powerful representation spaces in machine learning. For instance, hyperbolic geometry is appropriate to represent graphs without cycles and has been used to extend Graph Neural Networks. Recently, some pseudo-Riemannian space forms that generalize both hyperbolic and spherical geometries have been exploited to learn a specific type of nonparametric embedding called ultrahyperbolic. The lack of geodesic between every pair of ultrahyperbolic points makes the task of learning parametric models (e.g., neural networks) difficult. This paper introduces a method to learn parametric models in ultrahyperbolic space. We experimentally show the relevance of our approach in the tasks of graph and node classification.
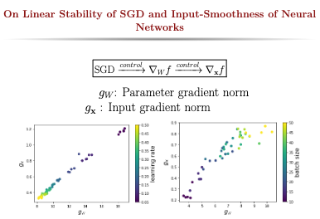
The multiplicative structure of parameters and input data in the first layer of neural networks is explored to build connection between the landscape of the loss function with respect to parameters and the landscape of the model function with respect to input data. By this connection, it is shown that flat minima regularize the gradient of the model function, which explains the good generalization performance of flat minima. Then, we go beyond the flatness and consider high-order moments of the gradient noise, and show that Stochastic Gradient Dascent (SGD) tends to impose constraints on these moments by a linear stability analysis of SGD around global minima. Together with the multiplicative structure, we identify the Sobolev regularization effect of SGD, i.e. SGD regularizes the Sobolev seminorms of the model function with respect to the input data. Finally, bounds for generalization error and adversarial robustness are provided for solutions found by SGD under assumptions of the data distribution.
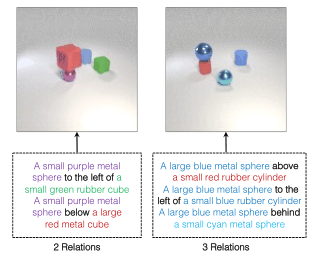
The visual world around us can be described as a structured set of objects and their associated relations. An image of a room may be conjured given only the description of the underlying objects and their associated relations. While there has been significant work on designing deep neural networks which may compose individual objects together, less work has been done on composing the individual relations between objects. A principal difficulty is that while the placement of objects is mutually independent, their relations are entangled and dependent on each other. To circumvent this issue, existing works primarily compose relations by utilizing a holistic encoder, in the form of text or graphs. In this work, we instead propose to represent each relation as an unnormalized density (an energy-based model), enabling us to compose separate relations in a factorized manner. We show that such a factorized decomposition allows the model to both generate and edit scenes that have multiple sets of relations more faithfully. We further show that decomposition enables our model to effectively understand the underlying relational scene structure.
Progressively applying Gaussian noise transforms complex data distributions to approximately Gaussian. Reversing this dynamic defines a generative model. When the forward noising process is given by a Stochastic Differential Equation (SDE), Song et al (2021) demonstrate how the time inhomogeneous drift of the associated reverse-time SDE may be estimated using score-matching. A limitation of this approach is that the forward-time SDE must be run for a sufficiently long time for the final distribution to be approximately Gaussian. In contrast, solving the Schrödinger Bridge (SB) problem, i.e. an entropy-regularized optimal transport problem on path spaces, yields diffusions which generate samples from the data distribution in finite time. We present Diffusion SB (DSB), an original approximation of the Iterative Proportional Fitting (IPF) procedure to solve the SB problem, and provide theoretical analysis along with generative modeling experiments. The first DSB iteration recovers the methodology proposed by Song et al. (2021), with the flexibility of using shorter time intervals, as subsequent DSB iterations reduce the discrepancy between the final-time marginal of the forward (resp. backward) SDE with respect to the prior (resp. data) distribution. Beyond generative modeling, DSB offers a widely applicable computational optimal transport tool as the continuous state-space analogue of the …
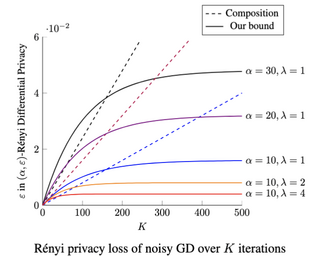
What is the information leakage of an iterative randomized learning algorithm about its training data, when the internal state of the algorithm is \emph{private}? How much is the contribution of each specific training epoch to the information leakage through the released model? We study this problem for noisy gradient descent algorithms, and model the \emph{dynamics} of R\'enyi differential privacy loss throughout the training process. Our analysis traces a provably \emph{tight} bound on the R\'enyi divergence between the pair of probability distributions over parameters of models trained on neighboring datasets. We prove that the privacy loss converges exponentially fast, for smooth and strongly convex loss functions, which is a significant improvement over composition theorems (which over-estimate the privacy loss by upper-bounding its total value over all intermediate gradient computations). For Lipschitz, smooth, and strongly convex loss functions, we prove optimal utility with a small gradient complexity for noisy gradient descent algorithms.
Cutting-plane methods have enabled remarkable successes in integer programming over the last few decades. State-of-the-art solvers integrate a myriad of cutting-plane techniques to speed up the underlying tree-search algorithm used to find optimal solutions. In this paper we provide sample complexity bounds for cut-selection in branch-and-cut (B&C). Given a training set of integer programs sampled from an application-specific input distribution and a family of cut selection policies, these guarantees bound the number of samples sufficient to ensure that using any policy in the family, the size of the tree B&C builds on average over the training set is close to the expected size of the tree B&C builds. We first bound the sample complexity of learning cutting planes from the canonical family of Chvátal-Gomory cuts. Our bounds handle any number of waves of any number of cuts and are fine tuned to the magnitudes of the constraint coefficients. Next, we prove sample complexity bounds for more sophisticated cut selection policies that use a combination of scoring rules to choose from a family of cuts. Finally, beyond the realm of cutting planes for integer programming, we develop a general abstraction of tree search that captures key components such as node selection …
State-of-the-art neural models of source code tend to be evaluated on the generation of individual expressions and lines of code, and commonly fail on long-horizon tasks such as the generation of entire method bodies. We propose to address this deficiency using weak supervision from a static program analyzer. Our neurosymbolic method allows a deep generative model to symbolically compute, using calls to a static analysis tool, long-distance semantic relationships in the code that it has already generated. During training, the model observes these relationships and learns to generate programs conditioned on them. We apply our approach to the problem of generating entire Java methods given the remainder of the class that contains the method. Our experiments show that the approach substantially outperforms a state-of-the-art transformer and a model that explicitly tries to learn program semantics on this task, both in terms of producing programs free of basic semantic errors and in terms of syntactically matching the ground truth.

Graphs have been widely used in data mining and machine learning due to their unique representation of real-world objects and their interactions. As graphs are getting bigger and bigger nowadays, it is common to see their subgraphs separately collected and stored in multiple local systems. Therefore, it is natural to consider the subgraph federated learning setting, where each local system holds a small subgraph that may be biased from the distribution of the whole graph. Hence, the subgraph federated learning aims to collaboratively train a powerful and generalizable graph mining model without directly sharing their graph data. In this work, towards the novel yet realistic setting of subgraph federated learning, we propose two major techniques: (1) FedSage, which trains a GraphSage model based on FedAvg to integrate node features, link structures, and task labels on multiple local subgraphs; (2) FedSage+, which trains a missing neighbor generator along FedSage to deal with missing links across local subgraphs. Empirical results on four real-world graph datasets with synthesized subgraph federated learning settings demonstrate the effectiveness and efficiency of our proposed techniques. At the same time, consistent theoretical implications are made towards their generalization ability on the global graphs.
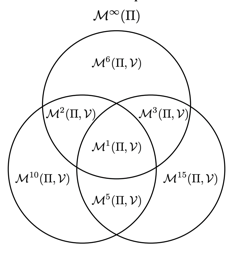
A Forster transform is an operation that turns a multivariate distribution into one with good anti-concentration properties. While a Forster transform does not always exist, we show that any distribution can be efficiently decomposed as a disjoint mixture of few distributions for which a Forster transform exists and can be computed efficiently. As the main application of this result, we obtain the first polynomial-time algorithm for distribution-independent PAC learning of halfspaces in the Massart noise model with strongly polynomial sample complexity, i.e., independent of the bit complexity of the examples. Previous algorithms for this learning problem incurred sample complexity scaling polynomially with the bit complexity, even though such a dependence is not information-theoretically necessary.
We tackle sequential learning under label noise in applications where a human supervisor can be queried to relabel suspicious examples. Existing approaches are flawed, in that they only relabel incoming examples that look "suspicious" to the model. As a consequence, those mislabeled examples that elude (or don't undergo) this cleaning step end up tainting the training data and the model with no further chance of being cleaned. We propose CINCER, a novel approach that cleans both new and past data by identifying \emph{pairs of mutually incompatible examples}. Whenever it detects a suspicious example, CINCER identifies a counter-example in the training set that - according to the model - is maximally incompatible with the suspicious example, and asks the annotator to relabel either or both examples, resolving this possible inconsistency. The counter-examples are chosen to be maximally incompatible, so to serve as \emph{explanations} of the model's suspicion, and highly influential, so to convey as much information as possible if relabeled. CINCER achieves this by leveraging an efficient and robust approximation of influence functions based on the Fisher information matrix (FIM). Our extensive empirical evaluation shows that clarifying the reasons behind the model's suspicions by cleaning the counter-examples helps in acquiring substantially …
The introduction of Variational Autoencoders (VAE) has been marked as a breakthrough in the history of representation learning models. Besides having several accolades of its own, VAE has successfully flagged off a series of inventions in the form of its immediate successors. Wasserstein Autoencoder (WAE), being an heir to that realm carries with it all of the goodness and heightened generative promises, matching even the generative adversarial networks (GANs). Needless to say, recent years have witnessed a remarkable resurgence in statistical analyses of the GANs. Similar examinations for Autoencoders however, despite their diverse applicability and notable empirical performance, remain largely absent. To close this gap, in this paper, we investigate the statistical properties of WAE. Firstly, we provide statistical guarantees that WAE achieves the target distribution in the latent space, utilizing the Vapnik–Chervonenkis (VC) theory. The main result, consequently ensures the regeneration of the input distribution, harnessing the potential offered by Optimal Transport of measures under the Wasserstein metric. This study, in turn, hints at the class of distributions WAE can reconstruct after suffering a compression in the form of a latent law.
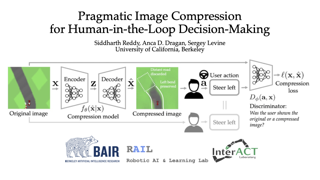
Standard lossy image compression algorithms aim to preserve an image's appearance, while minimizing the number of bits needed to transmit it. However, the amount of information actually needed by the user for downstream tasks -- e.g., deciding which product to click on in a shopping website -- is likely much lower. To achieve this lower bitrate, we would ideally only transmit the visual features that drive user behavior, while discarding details irrelevant to the user's decisions. We approach this problem by training a compression model through human-in-the-loop learning as the user performs tasks with the compressed images. The key insight is to train the model to produce a compressed image that induces the user to take the same action that they would have taken had they seen the original image. To approximate the loss function for this model, we train a discriminator that tries to distinguish whether a user's action was taken in response to the compressed image or the original. We evaluate our method through experiments with human participants on four tasks: reading handwritten digits, verifying photos of faces, browsing an online shopping catalogue, and playing a car racing video game. The results show that our method learns to …
In recent years, substantial research on the methods for learning Hamiltonian equations has been conducted. Although these approaches are very promising, the commonly used representation of the Hamilton equation uses the generalized momenta, which are generally unknown. Therefore, the training data must be represented in this unknown coordinate system, and this causes difficulty in applying the model to real data. Meanwhile, Hamiltonian equations also have a coordinate-free expression that is expressed by using the symplectic 2-form. In this study, we propose a model that learns the symplectic form from data using neural networks, thereby providing a method for learning Hamiltonian equations from data represented in general coordinate systems, which are not limited to the generalized coordinates and the generalized momenta. Consequently, the proposed method is capable not only of modeling target equations of both Hamiltonian and Lagrangian formalisms but also of extracting unknown Hamiltonian structures hidden in the data. For example, many polynomial ordinary differential equations such as the Lotka-Volterra equation are known to admit non-trivial Hamiltonian structures, and our numerical experiments show that such structures can be certainly learned from data. Technically, each symplectic 2-form is associated with a skew-symmetric matrix, but not all skew-symmetric matrices define the symplectic …
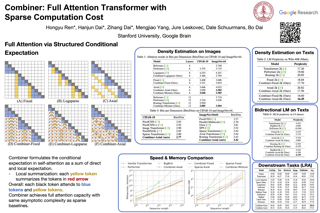
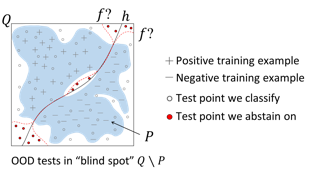
A common challenge across all areas of machine learning is that training data is not distributed like test data, due to natural shifts or adversarial examples; such examples are referred to as out-of-distribution (OOD) test examples. We consider a model where one may abstain from predicting, at a fixed cost. In particular, our transductive abstention algorithm takes labeled training examples and unlabeled test examples as input, and provides predictions with optimal prediction loss guarantees. The loss bounds match standard generalization bounds when test examples are i.i.d. from the training distribution, but add an additional term that is the cost of abstaining times the statistical distance between the train and test distribution (or the fraction of adversarial examples). For linear regression, we give a polynomial-time algorithm based on Celis-Dennis-Tapia optimization algorithms. For binary classification, we show how to efficiently implement it using a proper agnostic learner (i.e., an Empirical Risk Minimizer) for the class of interest. Our work builds on recent work of Goldwasser, Kalais, and Montasser (2020) who gave error and abstention guarantees for transductive binary classification.
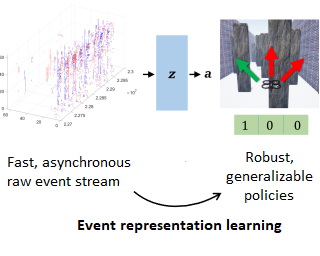
Event-based cameras are dynamic vision sensors that provide asynchronous measurements of changes in per-pixel brightness at a microsecond level. This makes them significantly faster than conventional frame-based cameras, and an appealing choice for high-speed robot navigation. While an interesting sensor modality, this asynchronously streamed event data poses a challenge for machine learning based computer vision techniques that are more suited for synchronous, frame-based data. In this paper, we present an event variational autoencoder through which compact representations can be learnt directly from asynchronous spatiotemporal event data. Furthermore, we show that such pretrained representations can be used for event-based reinforcement learning instead of end-to-end reward driven perception. We validate this framework of learning event-based visuomotor policies by applying it to an obstacle avoidance scenario in simulation. Compared to techniques that treat event data as images, we show that representations learnt from event streams result in faster policy training, adapt to different control capacities, and demonstrate a higher degree of robustness to environmental changes and sensor noise.
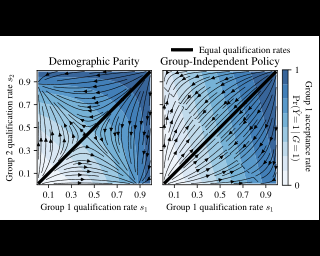
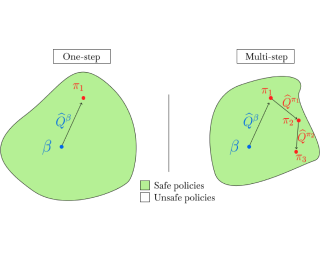
Most prior approaches to offline reinforcement learning (RL) have taken an iterative actor-critic approach involving off-policy evaluation. In this paper we show that simply doing one step of constrained/regularized policy improvement using an on-policy Q estimate of the behavior policy performs surprisingly well. This one-step algorithm beats the previously reported results of iterative algorithms on a large portion of the D4RL benchmark. The one-step baseline achieves this strong performance while being notably simpler and more robust to hyperparameters than previously proposed iterative algorithms. We argue that the relatively poor performance of iterative approaches is a result of the high variance inherent in doing off-policy evaluation and magnified by the repeated optimization of policies against those estimates. In addition, we hypothesize that the strong performance of the one-step algorithm is due to a combination of favorable structure in the environment and behavior policy.
Prediction of a molecule’s 3D conformer ensemble from the molecular graph holds a key role in areas of cheminformatics and drug discovery. Existing generative models have several drawbacks including lack of modeling important molecular geometry elements (e.g., torsion angles), separate optimization stages prone to error accumulation, and the need for structure fine-tuning based on approximate classical force-fields or computationally expensive methods. We propose GEOMOL --- an end-to-end, non-autoregressive, and SE(3)-invariant machine learning approach to generate distributions of low-energy molecular 3D conformers. Leveraging the power of message passing neural networks (MPNNs) to capture local and global graph information, we predict local atomic 3D structures and torsion angles, avoid- ing unnecessary over-parameterization of the geometric degrees of freedom (e.g., one angle per non-terminal bond). Such local predictions suffice both for both the training loss computation and for the full deterministic conformer assembly (at test time). We devise a non-adversarial optimal transport based loss function to promote diverse conformer generation. GEOMOL predominantly outperforms popular open-source, commercial, or state-of-the-art machine learning (ML) models, while achieving significant speed-ups. We expect such differentiable 3D structure generators to significantly impact molecular modeling and related applications.
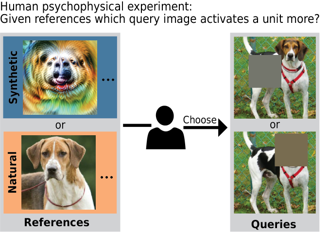
Bayesian structure learning allows inferring Bayesian network structure from data while reasoning about the epistemic uncertainty---a key element towards enabling active causal discovery and designing interventions in real world systems. In this work, we propose a general, fully differentiable framework for Bayesian structure learning (DiBS) that operates in the continuous space of a latent probabilistic graph representation. Contrary to existing work, DiBS is agnostic to the form of the local conditional distributions and allows for joint posterior inference of both the graph structure and the conditional distribution parameters. This makes our formulation directly applicable to posterior inference of nonstandard Bayesian network models, e.g., with nonlinear dependencies encoded by neural networks. Using DiBS, we devise an efficient, general purpose variational inference method for approximating distributions over structural models. In evaluations on simulated and real-world data, our method significantly outperforms related approaches to joint posterior inference.
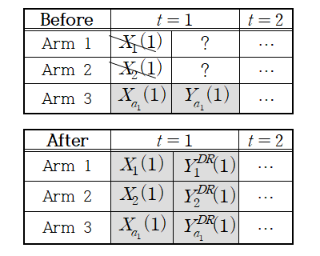
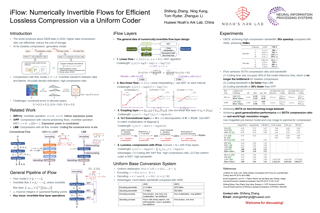
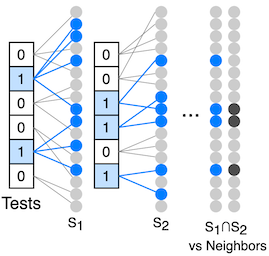
We present a new algorithm for the approximate near neighbor problem that combines classical ideas from group testing with locality-sensitive hashing (LSH). We reduce the near neighbor search problem to a group testing problem by designating neighbors as "positives," non-neighbors as "negatives," and approximate membership queries as group tests. We instantiate this framework using distance-sensitive Bloom Filters to Identify Near-Neighbor Groups (FLINNG). We prove that FLINNG has sub-linear query time and show that our algorithm comes with a variety of practical advantages. For example, FLINNG can be constructed in a single pass through the data, consists entirely of efficient integer operations, and does not require any distance computations. We conduct large-scale experiments on high-dimensional search tasks such as genome search, URL similarity search, and embedding search over the massive YFCC100M dataset. In our comparison with leading algorithms such as HNSW and FAISS, we find that FLINNG can provide up to a 10x query speedup with substantially smaller indexing time and memory.
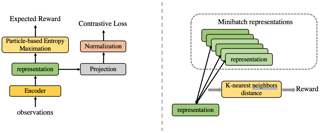
We introduce a new unsupervised pre-training method for reinforcement learning called APT, which stands for Active Pre-Training. APT learns behaviors and representations by actively searching for novel states in reward-free environments. The key novel idea is to explore the environment by maximizing a non-parametric entropy computed in an abstract representation space, which avoids challenging density modeling and consequently allows our approach to scale much better in environments that have high-dimensional observations (e.g., image observations). We empirically evaluate APT by exposing task-specific reward after a long unsupervised pre-training phase. In Atari games, APT achieves human-level performance on 12 games and obtains highly competitive performance compared to canonical fully supervised RL algorithms. On DMControl suite, APT beats all baselines in terms of asymptotic performance and data efficiency and dramatically improves performance on tasks that are extremely difficult to train from scratch.
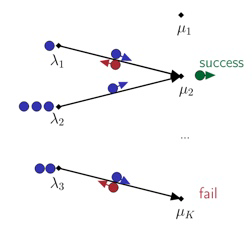
Finding diverse and representative Pareto solutions from the Pareto front is a key challenge in multi-objective optimization (MOO). In this work, we propose a novel gradient-based algorithm for profiling Pareto front by using Stein variational gradient descent (SVGD). We also provide a counterpart of our method based on Langevin dynamics. Our methods iteratively update a set of points in a parallel fashion to push them towards the Pareto front using multiple gradient descent, while encouraging the diversity between the particles by using the repulsive force mechanism in SVGD, or diffusion noise in Langevin dynamics. Compared with existing gradient-based methods that require predefined preference functions, our method can work efficiently in high dimensional problems, and can obtain more diverse solutions evenly distributed in the Pareto front. Moreover, our methods are theoretically guaranteed to converge to the Pareto front. We demonstrate the effectiveness of our method, especially the SVGD algorithm, through extensive experiments, showing its superiority over existing gradient-based algorithms.
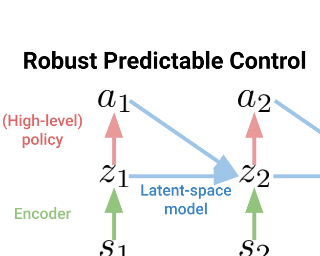
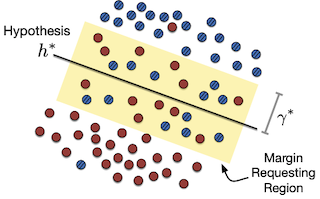
We derive a novel active learning algorithm in the streaming setting for binary classification tasks. The algorithm leverages weak labels to minimize the number of label requests, and trains a model to optimize a surrogate loss on a resulting set of labeled and weak-labeled points. Our algorithm jointly admits two crucial properties: theoretical guarantees in the general agnostic setting and a strong empirical performance. Our theoretical analysis shows that the algorithm attains favorable generalization and label complexity bounds, while our empirical study on 18 real-world datasets demonstrate that the algorithm outperforms standard baselines, including the Margin Algorithm, or Uncertainty Sampling, a high-performing active learning algorithm favored by practitioners.
We propose a deep reinforcement learning (RL) method to learn large neighborhood search (LNS) policy for integer programming (IP). The RL policy is trained as the destroy operator to select a subset of variables at each step, which is reoptimized by an IP solver as the repair operator. However, the combinatorial number of variable subsets prevents direct application of typical RL algorithms. To tackle this challenge, we represent all subsets by factorizing them into binary decisions on each variable. We then design a neural network to learn policies for each variable in parallel, trained by a customized actor-critic algorithm. We evaluate the proposed method on four representative IP problems. Results show that it can find better solutions than SCIP in much less time, and significantly outperform other LNS baselines with the same runtime. Moreover, these advantages notably persist when the policies generalize to larger problems. Further experiments with Gurobi also reveal that our method can outperform this state-of-the-art commercial solver within the same time limit.
Recent papers on the theory of representation learning has shown the importance of a quantity called diversity when generalizing from a set of source tasks to a target task. Most of these papers assume that the function mapping shared representations to predictions is linear, for both source and target tasks. In practice, researchers in deep learning use different numbers of extra layers following the pretrained model based on the difficulty of the new task. This motivates us to ask whether diversity can be achieved when source tasks and the target task use different prediction function spaces beyond linear functions. We show that diversity holds even if the target task uses a neural network with multiple layers, as long as source tasks use linear functions. If source tasks use nonlinear prediction functions, we provide a negative result by showing that depth-1 neural networks with ReLu activation function need exponentially many source tasks to achieve diversity. For a general function class, we find that eluder dimension gives a lower bound on the number of tasks required for diversity. Our theoretical results imply that simpler tasks generalize better. Though our theoretical results are shown for the global minimizer of empirical risks, their qualitative …
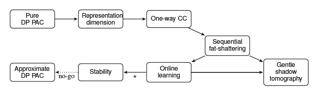
Learning an unknown n-qubit quantum state rho is a fundamental challenge in quantum computing. Information-theoretically, it is known that tomography requires exponential in n many copies of rho to estimate its entries. Motivated by learning theory, Aaronson et al. introduced many (weaker) learning models: the PAC model of learning states (Proceedings of Royal Society A'07), shadow tomography (STOC'18) for learning shadows" of a state, a model that also requires learners to be differentially private (STOC'19) and the online model of learning states (NeurIPS'18). In these models it was shown that an unknown state can be learnedapproximately" using linear in n many copies of rho. But is there any relationship between these models? In this paper we prove a sequence of (information-theoretic) implications from differentially-private PAC learning to online learning and then to quantum stability.Our main result generalizes the recent work of Bun, Livni and Moran (Journal of the ACM'21) who showed that finite Littlestone dimension (of Boolean-valued concept classes) implies PAC learnability in the (approximate) differentially private (DP) setting. We first consider their work in the real-valued setting and further extend to their techniques to the setting of learning quantum states. Key to our results is our generic quantum …
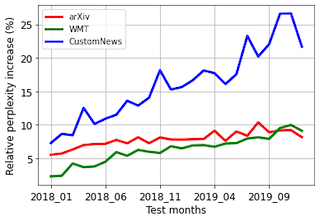
Our world is open-ended, non-stationary, and constantly evolving; thus what we talk about and how we talk about it change over time. This inherent dynamic nature of language contrasts with the current static language modelling paradigm, which trains and evaluates models on utterances from overlapping time periods. Despite impressive recent progress, we demonstrate that Transformer-XL language models perform worse in the realistic setup of predicting future utterances from beyond their training period, and that model performance becomes increasingly worse with time. We find that, while increasing model size alone—a key driver behind recent progress—does not solve this problem, having models that continually update their knowledge with new information can indeed mitigate this performance degradation over time. Hence, given the compilation of ever-larger language modelling datasets, combined with the growing list of language-model-based NLP applications that require up-to-date factual knowledge about the world, we argue that now is the right time to rethink the static way in which we currently train and evaluate our language models, and develop adaptive language models that can remain up-to-date with respect to our ever-changing and non-stationary world. We publicly release our dynamic, streaming language modelling benchmarks for WMT and arXiv to facilitate language model evaluation …
In this paper, we consider the problem of iterative machine teaching, where a teacher provides examples sequentially based on the current iterative learner. In contrast to previous methods that have to scan over the entire pool and select teaching examples from it in each iteration, we propose a label synthesis teaching framework where the teacher randomly selects input teaching examples (e.g., images) and then synthesizes suitable outputs (e.g., labels) for them. We show that this framework can avoid costly example selection while still provably achieving exponential teachability. We propose multiple novel teaching algorithms in this framework. Finally, we empirically demonstrate the value of our framework.
The problem of selecting optimal backdoor adjustment sets to estimate causal effects in graphical models with hidden and conditioned variables is addressed. Previous work has defined optimality as achieving the smallest asymptotic estimation variance and derived an optimal set for the case without hidden variables. For the case with hidden variables there can be settings where no optimal set exists and currently only a sufficient graphical optimality criterion of limited applicability has been derived. In the present work optimality is characterized as maximizing a certain adjustment information which allows to derive a necessary and sufficient graphical criterion for the existence of an optimal adjustment set and a definition and algorithm to construct it. Further, the optimal set is valid if and only if a valid adjustment set exists and has higher (or equal) adjustment information than the Adjust-set proposed in Perkovi{\'c} et~al. [Journal of Machine Learning Research, 18: 1--62, 2018] for any graph. The results translate to minimal asymptotic estimation variance for a class of estimators whose asymptotic variance follows a certain information-theoretic relation. Numerical experiments indicate that the asymptotic results also hold for relatively small sample sizes and that the optimal adjustment set or minimized variants thereof often yield …
Language models can generate harmful and biased outputs and exhibit undesirable behavior according to a given cultural context. We propose a Process for Adapting Language Models to Society (PALMS) with Values-Targeted Datasets, an iterative process to significantly change model behavior by crafting and fine-tuning on a dataset that reflects a predetermined set of target values. We evaluate our process using three metrics: quantitative metrics with human evaluations that score output adherence to a target value, toxicity scoring on outputs; and qualitative metrics analyzing the most common word associated with a given social category. Through each iteration, we add additional training dataset examples based on observed shortcomings from evaluations. PALMS performs significantly better on all metrics compared to baseline and control models for a broad range of GPT-3 language model sizes without compromising capability integrity. We find that the effectiveness of PALMS increases with model size. We show that significantly adjusting language model behavior is feasible with a small, hand-curated dataset.
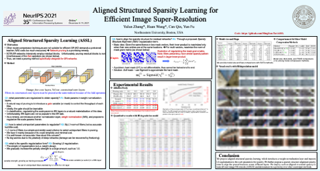
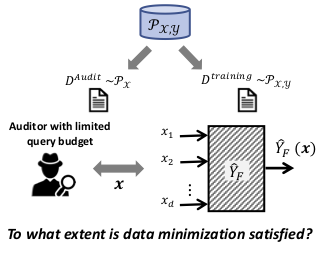
In this paper, we focus on auditing black-box prediction models for compliance with the GDPR’s data minimization principle. This principle restricts prediction models to use the minimal information that is necessary for performing the task at hand. Given the challenge of the black-box setting, our key idea is to check if each of the prediction model’s input features is individually necessary by assigning it some constant value (i.e., applying a simple imputation) across all prediction instances, and measuring the extent to which the model outcomes would change. We introduce a metric for data minimization that is based on model instability under simple imputations. We extend the applicability of this metric from a finite sample model to a distributional setting by introducing a probabilistic data minimization guarantee, which we derive using a Bayesian approach. Furthermore, we address the auditing problem under a constraint on the number of queries to the prediction system. We formulate the problem of allocating a budget of system queries to feasible simple imputations (for investigating model instability) as a multi-armed bandit framework with probabilistic success metrics. We define two bandit problems for providing a probabilistic data minimization guarantee at a given confidence level: a decision problem given …
This paper presents a new algorithm for domain generalization (DG), \textit{test-time template adjuster (T3A)}, aiming to robustify a model to unknown distribution shift. Unlike existing methods that focus on \textit{training phase}, our method focuses \textit{test phase}, i.e., correcting its prediction by itself during test time. Specifically, T3A adjusts a trained linear classifier (the last layer of deep neural networks) with the following procedure: (1) compute a pseudo-prototype representation for each class using online unlabeled data augmented by the base classifier trained in the source domains, (2) and then classify each sample based on its distance to the pseudo-prototypes. T3A is back-propagation-free and modifies only the linear layer; therefore, the increase in computational cost during inference is negligible and avoids the catastrophic failure might caused by stochastic optimization. Despite its simplicity, T3A can leverage knowledge about the target domain by using off-the-shelf test-time data and improve performance. We tested our method on four domain generalization benchmarks, namely PACS, VLCS, OfficeHome, and TerraIncognita, along with various backbone networks including ResNet18, ResNet50, Big Transfer (BiT), Vision Transformers (ViT), and MLP-Mixer. The results show T3A stably improves performance on unseen domains across choices of backbone networks, and outperforms existing domain generalization methods.
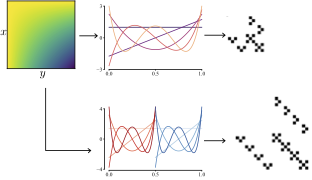
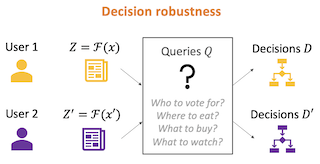
By filtering the content that users see, social media platforms have the ability to influence users' perceptions and decisions, from their dining choices to their voting preferences. This influence has drawn scrutiny, with many calling for regulations on filtering algorithms, but designing and enforcing regulations remains challenging. In this work, we examine three questions. First, given a regulation, how would one design an audit to enforce it? Second, does the audit impose a performance cost on the platform? Third, how does the audit affect the content that the platform is incentivized to filter? In response to these questions, we propose a method such that, given a regulation, an auditor can test whether that regulation is met with only black-box access to the filtering algorithm. We then turn to the platform's perspective. The platform's goal is to maximize an objective function while meeting regulation. We find that there are conditions under which the regulation does not place a high performance cost on the platform and, notably, that content diversity can play a key role in aligning the interests of the platform and regulators.
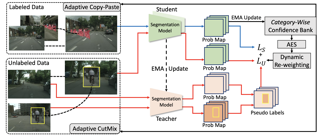
Due to the limited and even imbalanced data, semi-supervised semantic segmentation tends to have poor performance on some certain categories, e.g., tailed categories in Cityscapes dataset which exhibits a long-tailed label distribution. Existing approaches almost all neglect this problem, and treat categories equally. Some popular approaches such as consistency regularization or pseudo-labeling may even harm the learning of under-performing categories, that the predictions or pseudo labels of these categories could be too inaccurate to guide the learning on the unlabeled data. In this paper, we look into this problem, and propose a novel framework for semi-supervised semantic segmentation, named adaptive equalization learning (AEL). AEL adaptively balances the training of well and badly performed categories, with a confidence bank to dynamically track category-wise performance during training. The confidence bank is leveraged as an indicator to tilt training towards under-performing categories, instantiated in three strategies: 1) adaptive Copy-Paste and CutMix data augmentation approaches which give more chance for under-performing categories to be copied or cut; 2) an adaptive data sampling approach to encourage pixels from under-performing category to be sampled; 3) a simple yet effective re-weighting method to alleviate the training noise raised by pseudo-labeling. Experimentally, AEL outperforms the state-of-the-art methods by …
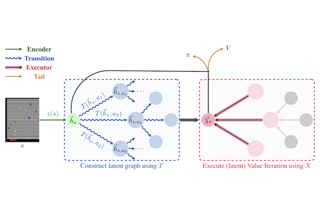
Implicit planning has emerged as an elegant technique for combining learned models of the world with end-to-end model-free reinforcement learning. We study the class of implicit planners inspired by value iteration, an algorithm that is guaranteed to yield perfect policies in fully-specified tabular environments. We find that prior approaches either assume that the environment is provided in such a tabular form---which is highly restrictive---or infer "local neighbourhoods" of states to run value iteration over---for which we discover an algorithmic bottleneck effect. This effect is caused by explicitly running the planning algorithm based on scalar predictions in every state, which can be harmful to data efficiency if such scalars are improperly predicted. We propose eXecuted Latent Value Iteration Networks (XLVINs), which alleviate the above limitations. Our method performs all planning computations in a high-dimensional latent space, breaking the algorithmic bottleneck. It maintains alignment with value iteration by carefully leveraging neural graph-algorithmic reasoning and contrastive self-supervised learning. Across seven low-data settings---including classical control, navigation and Atari---XLVINs provide significant improvements to data efficiency against value iteration-based implicit planners, as well as relevant model-free baselines. Lastly, we empirically verify that XLVINs can closely align with value iteration.
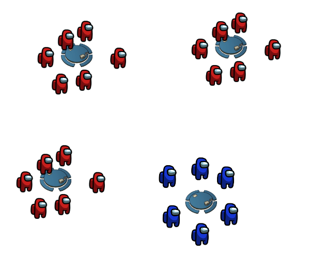
Understanding generalization in deep learning has been one of the major challenges in statistical learning theory over the last decade. While recent work has illustrated that the dataset and the training algorithm must be taken into account in order to obtain meaningful generalization bounds, it is still theoretically not clear which properties of the data and the algorithm determine the generalization performance. In this study, we approach this problem from a dynamical systems theory perspective and represent stochastic optimization algorithms as \emph{random iterated function systems} (IFS). Well studied in the dynamical systems literature, under mild assumptions, such IFSs can be shown to be ergodic with an invariant measure that is often supported on sets with a \emph{fractal structure}. As our main contribution, we prove that the generalization error of a stochastic optimization algorithm can be bounded based on the `complexity' of the fractal structure that underlies its invariant measure. Then, by leveraging results from dynamical systems theory, we show that the generalization error can be explicitly linked to the choice of the algorithm (e.g., stochastic gradient descent -- SGD), algorithm hyperparameters (e.g., step-size, batch-size), and the geometry of the problem (e.g., Hessian of the loss). We further specialize our results …
Temporal abstraction in reinforcement learning (RL), offers the promise of improving generalization and knowledge transfer in complex environments, by propagating information more efficiently over time. Although option learning was initially formulated in a way that allows updating many options simultaneously, using off-policy, intra-option learning (Sutton, Precup & Singh, 1999) , many of the recent hierarchical reinforcement learning approaches only update a single option at a time: the option currently executing. We revisit and extend intra-option learning in the context of deep reinforcement learning, in order to enable updating all options consistent with current primitive action choices, without introducing any additional estimates. Our method can therefore be naturally adopted in most hierarchical RL frameworks. When we combine our approach with the option-critic algorithm for option discovery, we obtain significant improvements in performance and data-efficiency across a wide variety of domains.
Generative Adversarial Networks (GANs) can generate near photo realistic images in narrow domains such as human faces. Yet, modeling complex distributions of datasets such as ImageNet and COCO-Stuff remains challenging in unconditional settings. In this paper, we take inspiration from kernel density estimation techniques and introduce a non-parametric approach to modeling distributions of complex datasets. We partition the data manifold into a mixture of overlapping neighborhoods described by a datapoint and its nearest neighbors, and introduce a model, called instance-conditioned GAN (IC-GAN), which learns the distribution around each datapoint. Experimental results on ImageNet and COCO-Stuff show that IC-GAN significantly improves over unconditional models and unsupervised data partitioning baselines. Moreover, we show that IC-GAN can effortlessly transfer to datasets not seen during training by simply changing the conditioning instances, and still generate realistic images. Finally, we extend IC-GAN to the class-conditional case and show semantically controllable generation and competitive quantitative results on ImageNet; while improving over BigGAN on ImageNet-LT. Code and trained models to reproduce the reported results are available at https://github.com/facebookresearch/ic_gan.
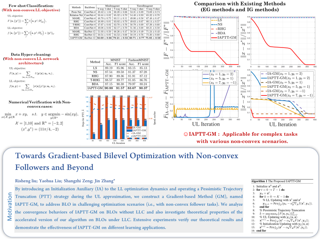
In recent years, Bi-Level Optimization (BLO) techniques have received extensive attentions from both learning and vision communities. A variety of BLO models in complex and practical tasks are of non-convex follower structure in nature (a.k.a., without Lower-Level Convexity, LLC for short). However, this challenging class of BLOs is lack of developments on both efficient solution strategies and solid theoretical guarantees. In this work, we propose a new algorithmic framework, named Initialization Auxiliary and Pessimistic Trajectory Truncated Gradient Method (IAPTT-GM), to partially address the above issues. In particular, by introducing an auxiliary as initialization to guide the optimization dynamics and designing a pessimistic trajectory truncation operation, we construct a reliable approximate version of the original BLO in the absence of LLC hypothesis. Our theoretical investigations establish the convergence of solutions returned by IAPTT-GM towards those of the original BLO without LLC. As an additional bonus, we also theoretically justify the quality of our IAPTT-GM embedded with Nesterov's accelerated dynamics under LLC. The experimental results confirm both the convergence of our algorithm without LLC, and the theoretical findings under LLC.
Distributional reinforcement learning (RL) – in which agents learn about all the possible long-term consequences of their actions, and not just the expected value – is of great recent interest. One of the most important affordances of a distributional view is facilitating a modern, measured, approach to risk when outcomes are not completely certain. By contrast, psychological and neuroscientific investigations into decision making under risk have utilized a variety of more venerable theoretical models such as prospect theory that lack axiomatically desirable properties such as coherence. Here, we consider a particularly relevant risk measure for modeling human and animal planning, called conditional value-at-risk (CVaR), which quantifies worst-case outcomes (e.g., vehicle accidents or predation). We first adopt a conventional distributional approach to CVaR in a sequential setting and reanalyze the choices of human decision-makers in the well-known two-step task, revealing substantial risk aversion that had been lurking under stickiness and perseveration. We then consider a further critical property of risk sensitivity, namely time consistency, showing alternatives to this form of CVaR that enjoy this desirable characteristic. We use simulations to examine settings in which the various forms differ in ways that have implications for human and animal planning and behavior.
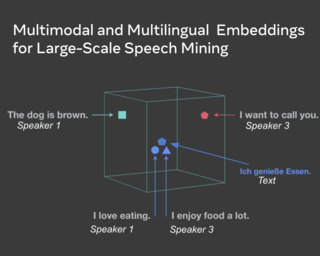
We present an approach to encode a speech signal into a fixed-size representation which minimizes the cosine loss with the existing massively multilingual LASER text embedding space. Sentences are close in this embedding space, independently of their language and modality, either text or audio. Using a similarity metric in that multimodal embedding space, we perform mining of audio in German, French, Spanish and English from Librivox against billions of sentences from Common Crawl. This yielded more than twenty thousand hours of aligned speech translations. To evaluate the automatically mined speech/text corpora, we train neural speech translation systems for several languages pairs. Adding the mined data, achieves significant improvements in the BLEU score on the CoVoST2 and the MUST-C test sets with respect to a very competitive baseline. Our approach can also be used to directly perform speech-to-speech mining, without the need to first transcribe or translate the data. We obtain more than one thousand three hundred hours of aligned speech in French, German, Spanish and English. This speech corpus has the potential to boost research in speech-to-speech translation which suffers from scarcity of natural end-to-end training data. All the mined multimodal corpora will be made freely available.
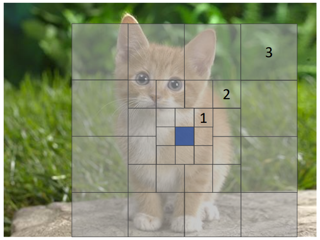
Recently, Vision Transformer and its variants have shown great promise on various computer vision tasks. The ability to capture local and global visual dependencies through self-attention is the key to its success. But it also brings challenges due to quadratic computational overhead, especially for the high-resolution vision tasks(e.g., object detection). Many recent works have attempted to reduce the cost and improve model performance by applying either coarse-grained global attention or fine-grained local attention. However, both approaches cripple the modeling power of the original self-attention mechanism of multi-layer Transformers, leading to sub-optimal solutions. In this paper, we present focal attention, a new attention mechanism that incorporates both fine-grained local and coarse-grained global interactions. In this new mechanism, each token attends its closest surrounding tokens at the fine granularity and the tokens far away at a coarse granularity and thus can capture both short- and long-range visual dependencies efficiently and effectively. With focal attention, we propose a new variant of Vision Transformer models, called Focal Transformers, which achieve superior performance over the state-of-the-art (SoTA) Vision Transformers on a range of public image classification and object detection benchmarks. In particular, our Focal Transformer models with a moderate size of 51.1M and a large …
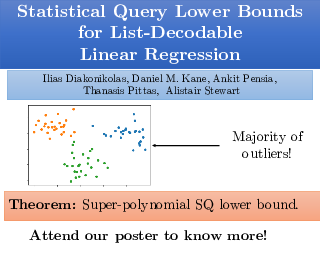
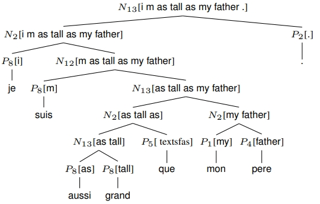
Sequence-to-sequence learning with neural networks has become the de facto standard for sequence modeling. This approach typically models the local distribution over the next element with a powerful neural network that can condition on arbitrary context. While flexible and performant, these models often require large datasets for training and can fail spectacularly on benchmarks designed to test for compositional generalization. This work explores an alternative, hierarchical approach to sequence-to-sequence learning with synchronous grammars, where each node in the target tree is transduced by a subset of nodes in the source tree. The source and target trees are treated as fully latent and marginalized out during training. We develop a neural parameterization of the grammar which enables parameter sharing over combinatorial structures without the need for manual feature engineering. We apply this latent neural grammar to various domains---a diagnostic language navigation task designed to test for compositional generalization (SCAN), style transfer, and small-scale machine translation---and find that it performs respectably compared to standard baselines.
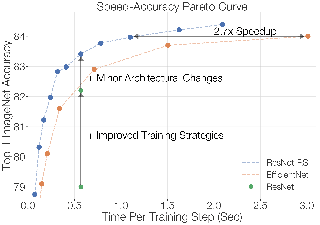
Novel computer vision architectures monopolize the spotlight, but the impact of the model architecture is often conflated with simultaneous changes to training methodology and scaling strategies.Our work revisits the canonical ResNet and studies these three aspects in an effort to disentangle them. Perhaps surprisingly, we find that training and scaling strategies may matter more than architectural changes, and further, that the resulting ResNets match recent state-of-the-art models. We show that the best performing scaling strategy depends on the training regime and offer two new scaling strategies: (1) scale model depth in regimes where overfitting can occur (width scaling is preferable otherwise); (2) increase image resolution more slowly than previously recommended.Using improved training and scaling strategies, we design a family of ResNet architectures, ResNet-RS, which are 1.7x - 2.7x faster than EfficientNets on TPUs, while achieving similar accuracies on ImageNet. In a large-scale semi-supervised learning setup, ResNet-RS achieves 86.2% top-1 ImageNet accuracy, while being 4.7x faster than EfficientNet-NoisyStudent. The training techniques improve transfer performance on a suite of downstream tasks (rivaling state-of-the-art self-supervised algorithms) and extend to video classification on Kinetics-400. We recommend practitioners use these simple revised ResNets as baselines for future research.

Modern approaches typically formulate semantic segmentation as a per-pixel classification task, while instance-level segmentation is handled with an alternative mask classification. Our key insight: mask classification is sufficiently general to solve both semantic- and instance-level segmentation tasks in a unified manner using the exact same model, loss, and training procedure. Following this observation, we propose MaskFormer, a simple mask classification model which predicts a set of binary masks, each associated with a single global class label prediction. Overall, the proposed mask classification-based method simplifies the landscape of effective approaches to semantic and panoptic segmentation tasks and shows excellent empirical results. In particular, we observe that MaskFormer outperforms per-pixel classification baselines when the number of classes is large. Our mask classification-based method outperforms both current state-of-the-art semantic (55.6 mIoU on ADE20K) and panoptic segmentation (52.7 PQ on COCO) models.
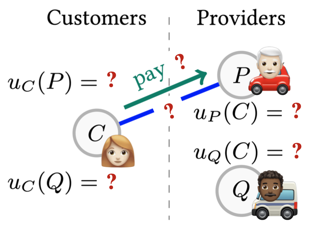
Large-scale, two-sided matching platforms must find market outcomes that align with user preferences while simultaneously learning these preferences from data. But since preferences are inherently uncertain during learning, the classical notion of stability (Gale and Shapley, 1962; Shapley and Shubik, 1971) is unattainable in these settings. To bridge this gap, we develop a framework and algorithms for learning stable market outcomes under uncertainty. Our primary setting is matching with transferable utilities, where the platform both matches agents and sets monetary transfers between them. We design an incentive-aware learning objective that captures the distance of a market outcome from equilibrium. Using this objective, we analyze the complexity of learning as a function of preference structure, casting learning as a stochastic multi-armed bandit problem. Algorithmically, we show that "optimism in the face of uncertainty," the principle underlying many bandit algorithms, applies to a primal-dual formulation of matching with transfers and leads to near-optimal regret bounds. Our work takes a first step toward elucidating when and how stable matchings arise in large, data-driven marketplaces.
Recently, there has been much interest in studying the convergence rates of without-replacement SGD, and proving that it is faster than with-replacement SGD in the worst case. However, known lower bounds ignore the problem's geometry, including its condition number, whereas the upper bounds explicitly depend on it. Perhaps surprisingly, we prove that when the condition number is taken into account, without-replacement SGD \emph{does not} significantly improve on with-replacement SGD in terms of worst-case bounds, unless the number of epochs (passes over the data) is larger than the condition number. Since many problems in machine learning and other areas are both ill-conditioned and involve large datasets, this indicates that without-replacement does not necessarily improve over with-replacement sampling for realistic iteration budgets. We show this by providing new lower and upper bounds which are tight (up to log factors), for quadratic problems with commuting quadratic terms, precisely quantifying the dependence on the problem parameters.