Poster
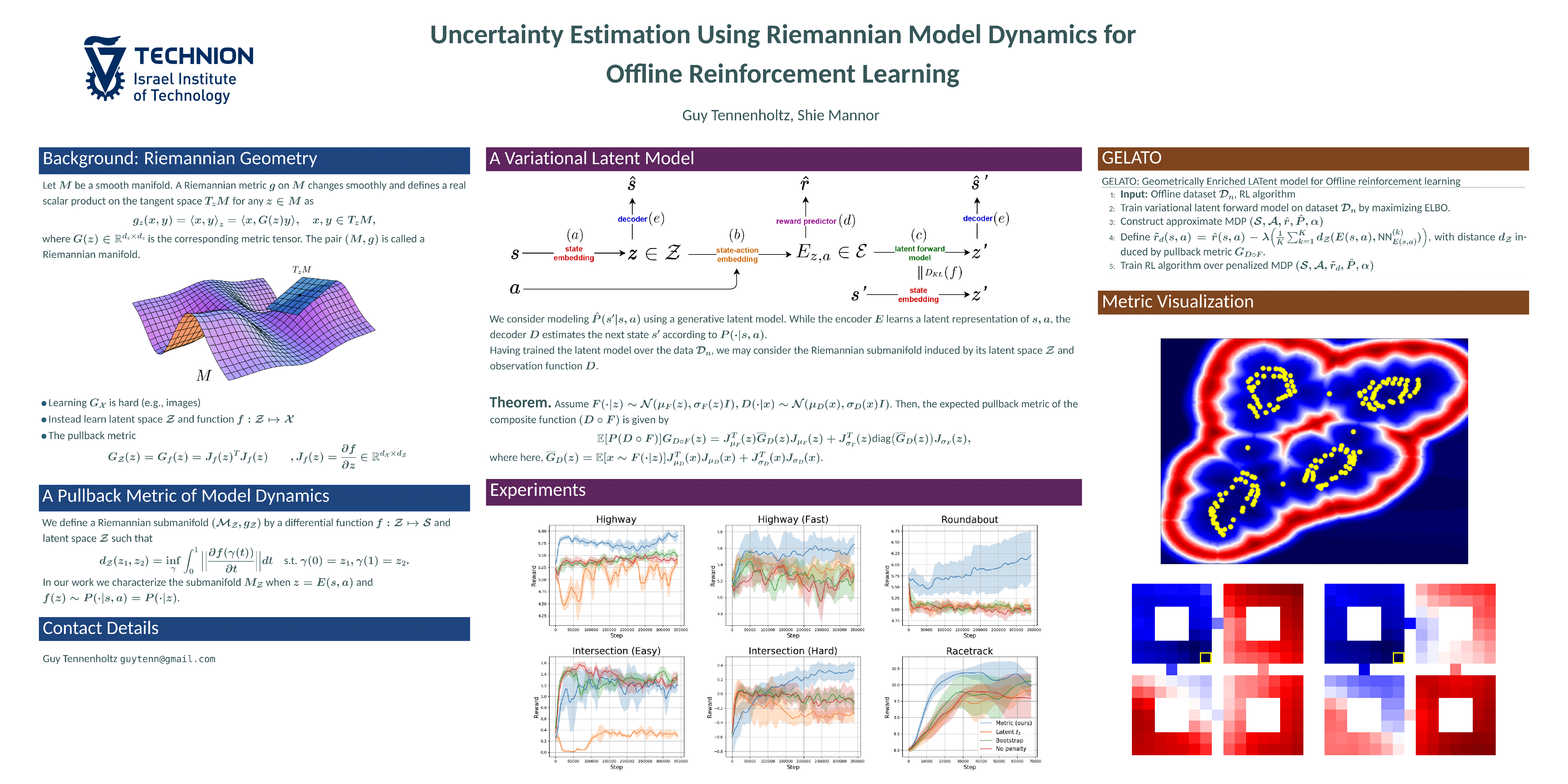
Uncertainty Estimation Using Riemannian Model Dynamics for Offline Reinforcement Learning
Guy Tennenholtz · Shie Mannor
Hall J (level 1) #224
Keywords: [ Reinforcement Learning ] [ Riemannian geometry ] [ Uncertainty Estimation ]
{kind=link}
Model-based offline reinforcement learning approaches generally rely on bounds of model error. Estimating these bounds is usually achieved through uncertainty estimation methods. In this work, we combine parametric and nonparametric methods for uncertainty estimation through a novel latent space based metric. In particular, we build upon recent advances in Riemannian geometry of generative models to construct a pullback metric of an encoder-decoder based forward model. Our proposed metric measures both the quality of out-of-distribution samples as well as the discrepancy of examples in the data. We leverage our combined method for uncertainty estimation in a pessimistic model-based framework, showing a significant improvement upon contemporary model-based offline approaches on continuous control and autonomous driving benchmarks.