Poster
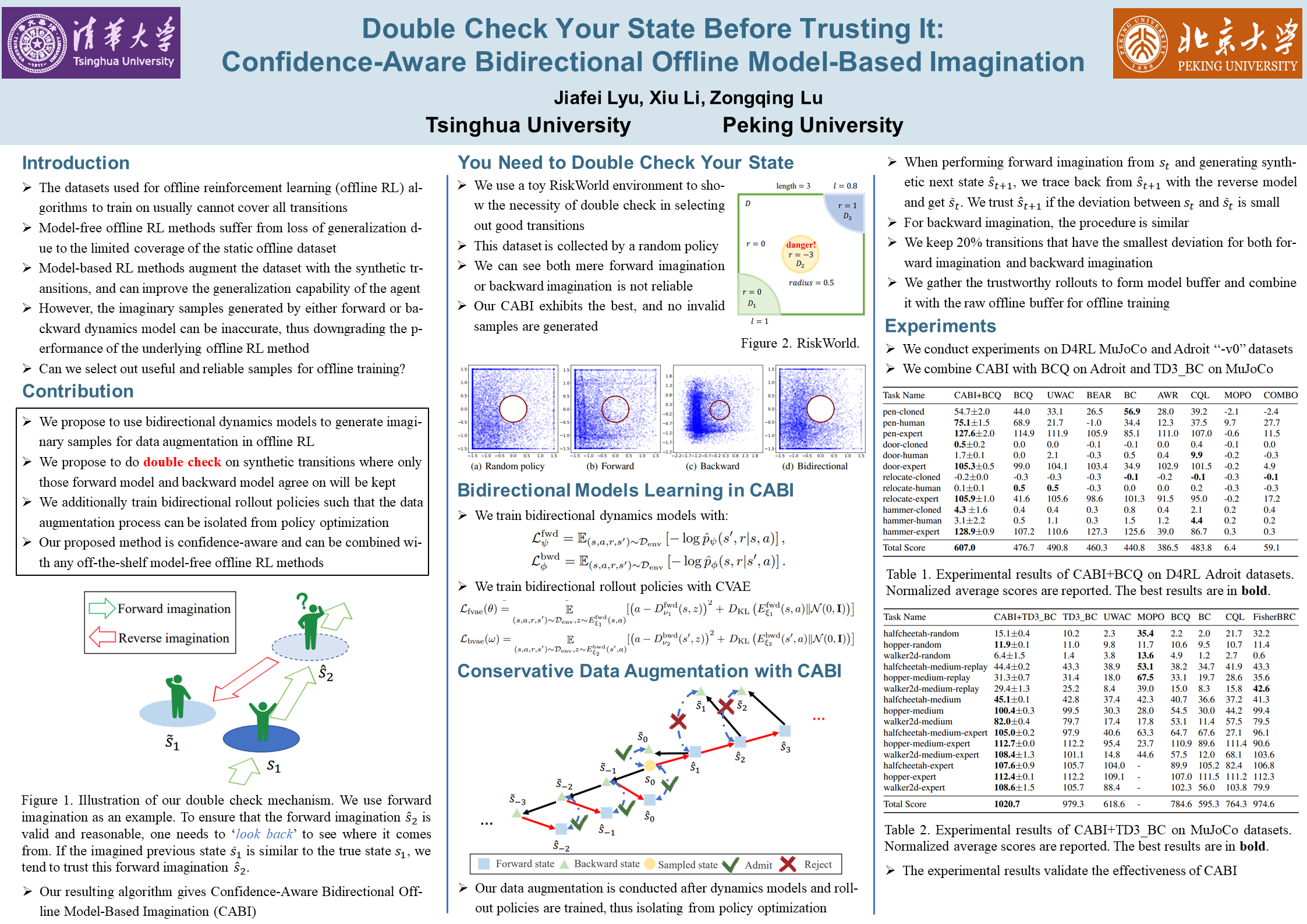
Double Check Your State Before Trusting It: Confidence-Aware Bidirectional Offline Model-Based Imagination
Jiafei Lyu · Xiu Li · Zongqing Lu
{kind=link}
The learned policy of model-free offline reinforcement learning (RL) methods is often constrained to stay within the support of datasets to avoid possible dangerous out-of-distribution actions or states, making it challenging to handle out-of-support region. Model-based RL methods offer a richer dataset and benefit generalization by generating imaginary trajectories with either trained forward or reverse dynamics model. However, the imagined transitions may be inaccurate, thus downgrading the performance of the underlying offline RL method. In this paper, we propose to augment the offline dataset by using trained bidirectional dynamics models and rollout policies with double check. We introduce conservatism by trusting samples that the forward model and backward model agree on. Our method, confidence-aware bidirectional offline model-based imagination, generates reliable samples and can be combined with any model-free offline RL method. Experimental results on the D4RL benchmarks demonstrate that our method significantly boosts the performance of existing model-free offline RL algorithms and achieves competitive or better scores against baseline methods.