Poster
Near-Optimal Regret Bounds for Multi-batch Reinforcement Learning
Zihan Zhang · Yuhang Jiang · Yuan Zhou · Xiangyang Ji
{kind=link}
Abstract:
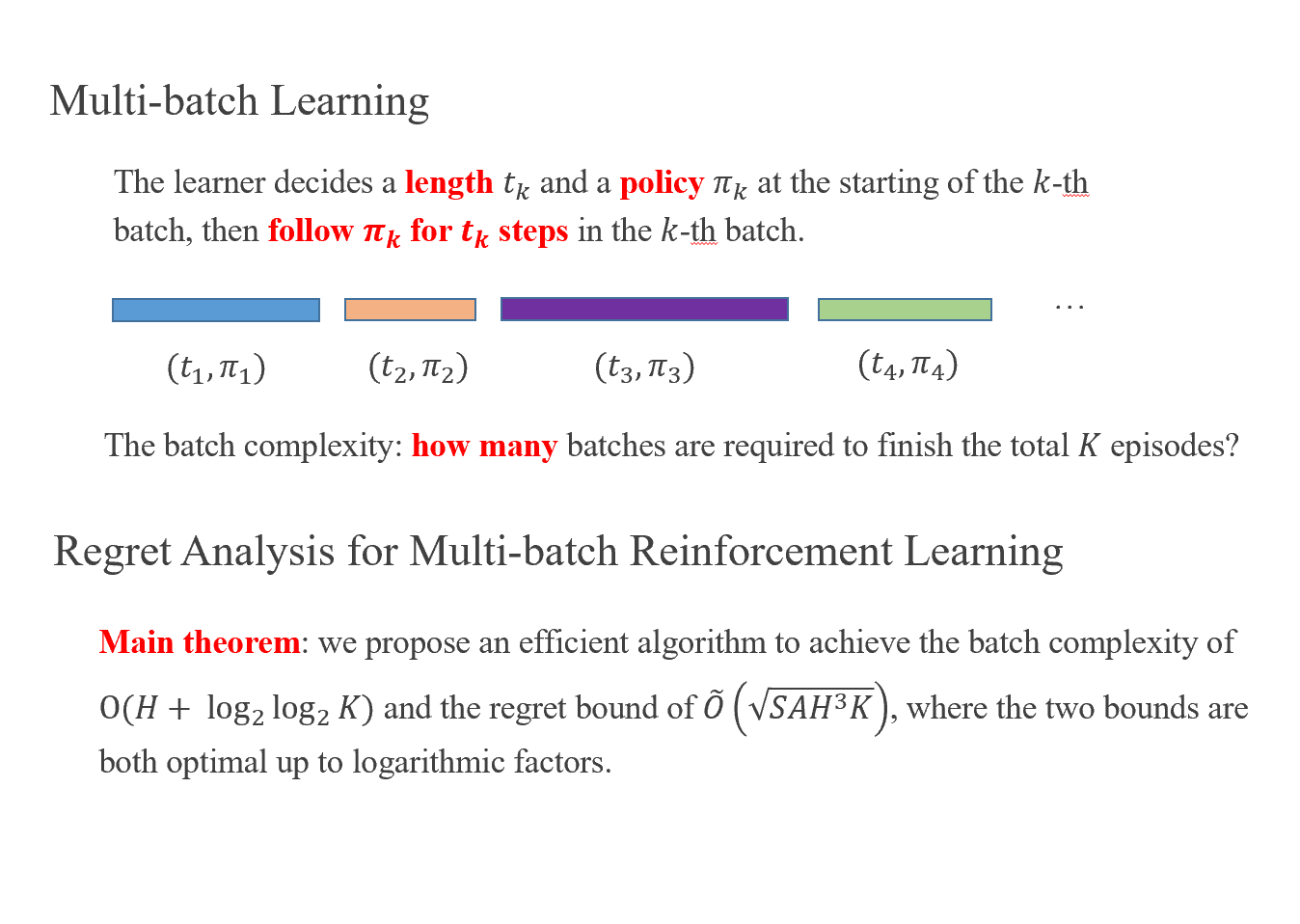
In this paper, we study the episodic reinforcement learning (RL) problem modeled by finite-horizon Markov Decision Processes (MDPs) with constraint on the number of batches. The multi-batch reinforcement learning framework, where the agent is required to provide a time schedule to update policy before everything, which is particularly suitable for the scenarios where the agent suffers extensively from changing the policy adaptively. Given a finite-horizon MDP with $S$ states, $A$ actions and planning horizon $H$, we design a computational efficient algorithm to achieve near-optimal regret of $\tilde{O}(\sqrt{SAH^3K\ln(1/\delta)})$\footnote{$\tilde{O}(\cdot)$ hides logarithmic terms of $(S,A,H,K)$} in $K$ episodes using $O\left(H+\log_2\log_2(K) \right)$ batches with confidence parameter $\delta$. To our best of knowledge, it is the first $\tilde{O}(\sqrt{SAH^3K})$ regret bound with $O(H+\log_2\log_2(K))$ batch complexity. Meanwhile, we show that to achieve $\tilde{O}(\mathrm{poly}(S,A,H)\sqrt{K})$ regret, the number of batches is at least $\Omega\left(H/\log_A(K)+ \log_2\log_2(K) \right)$, which matches our upper bound up to logarithmic terms.Our technical contribution are two-fold: 1) a near-optimal design scheme to explore over the unlearned states; 2) an computational efficient algorithm to explore certain directions with an approximated transition model.ion model.
Chat is not available.