Poster
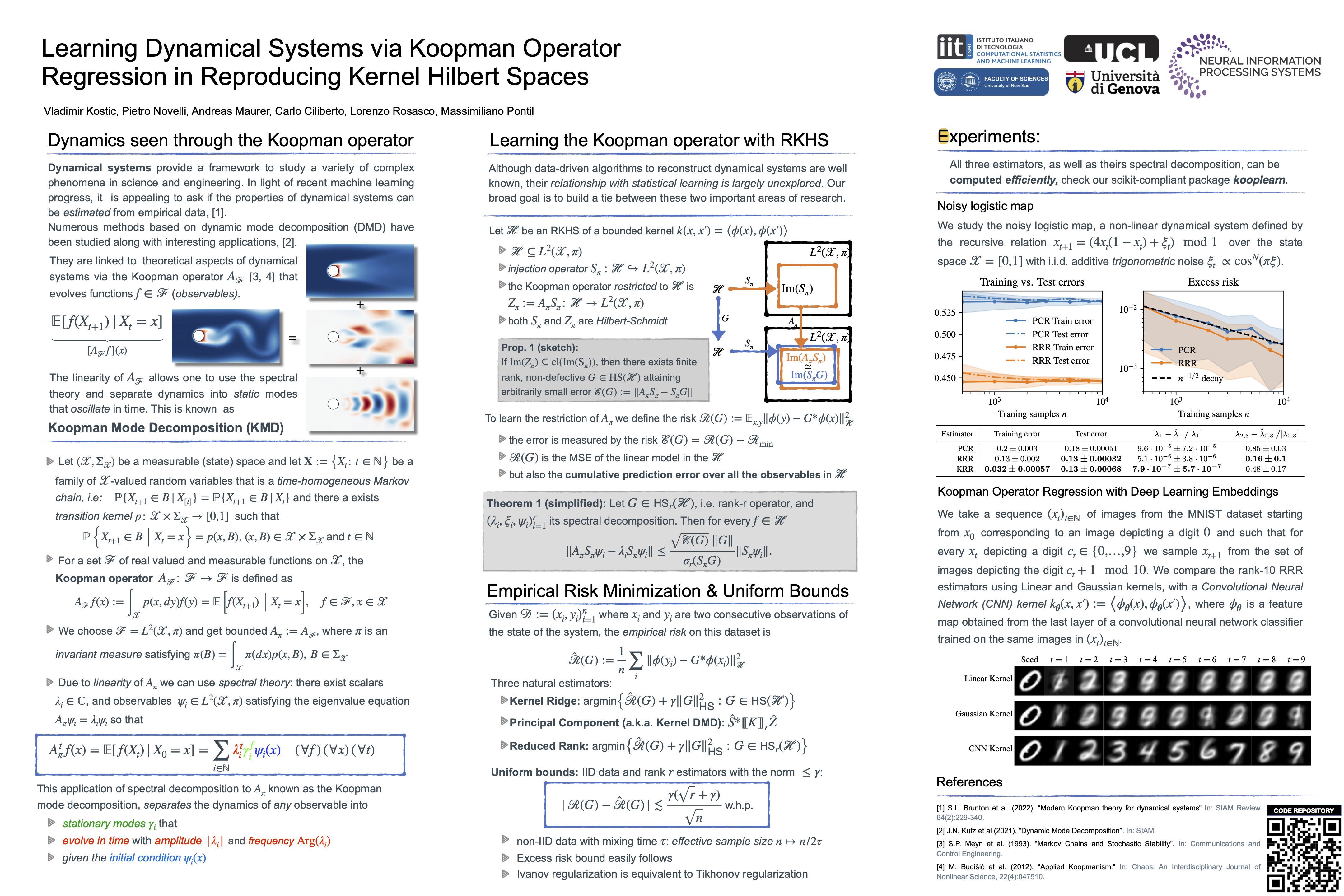
Learning Dynamical Systems via Koopman Operator Regression in Reproducing Kernel Hilbert Spaces
Vladimir Kostic · Pietro Novelli · Andreas Maurer · Carlo Ciliberto · Lorenzo Rosasco · Massimiliano Pontil
Hall J (level 1) #304
Keywords: [ supervised learning ] [ Dynamical Systems ] [ low rank approximation ] [ Markov transfer operator ] [ spectral decomposition ] [ Koopman operator ] [ DMD ]
{kind=link}
We study a class of dynamical systems modelled as stationary Markov chains that admit an invariant distribution via the corresponding transfer or Koopman operator. While data-driven algorithms to reconstruct such operators are well known, their relationship with statistical learning is largely unexplored. We formalize a framework to learn the Koopman operator from finite data trajectories of the dynamical system. We consider the restriction of this operator to a reproducing kernel Hilbert space and introduce a notion of risk, from which different estimators naturally arise. We link the risk with the estimation of the spectral decomposition of the Koopman operator. These observations motivate a reduced-rank operator regression (RRR) estimator. We derive learning bounds for the proposed estimator, holding both in i.i.d and non i.i.d. settings, the latter in terms of mixing coefficients. Our results suggest RRR might be beneficial over other widely used estimators as confirmed in numerical experiments both for forecasting and mode decomposition.