Poster
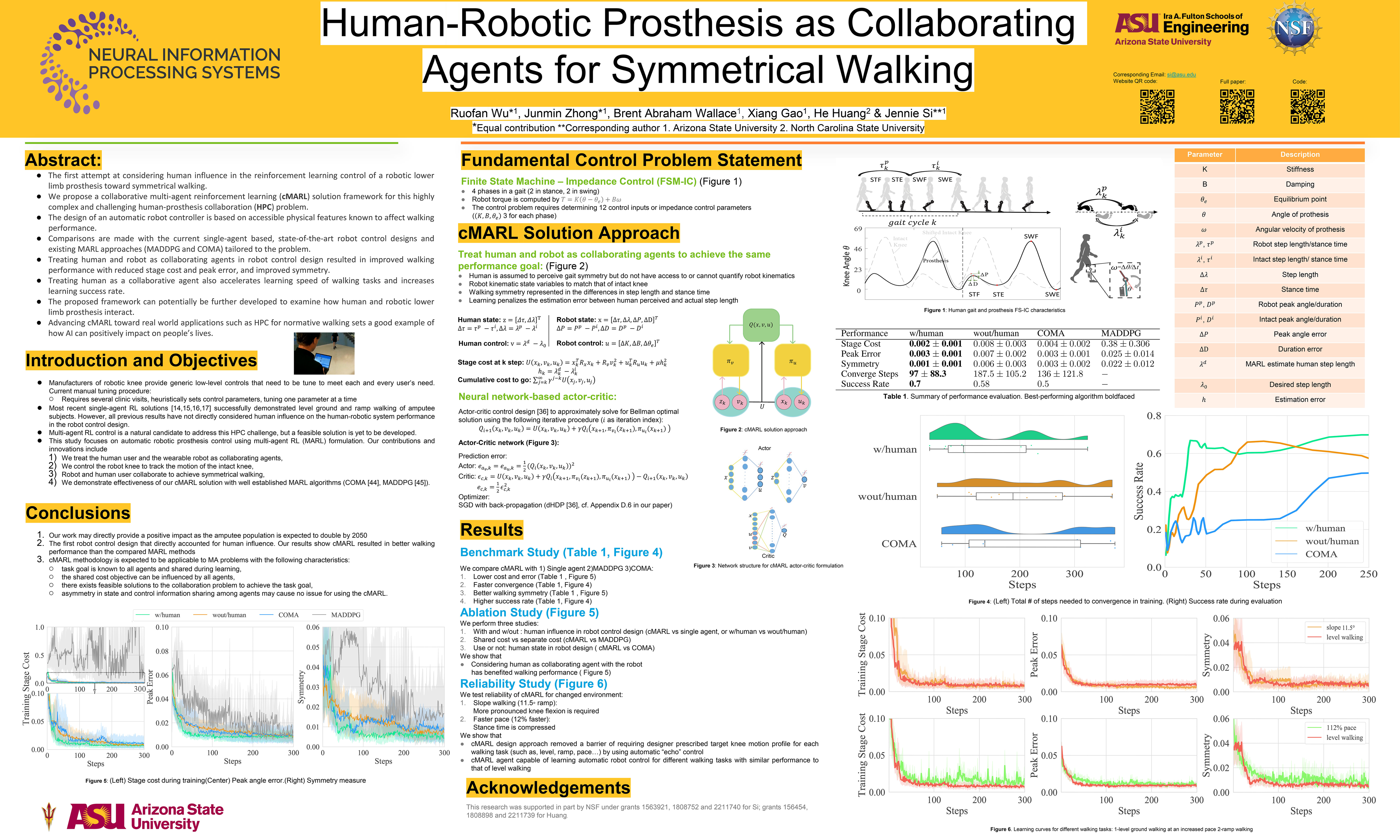
Human-Robotic Prosthesis as Collaborating Agents for Symmetrical Walking
Ruofan Wu · Junmin Zhong · Brent Wallace · Xiang Gao · He Huang · Jennie Si
Hall J (level 1) #227
Keywords: [ collaborative multi-agent reinforcement learning ] [ real world AI application ] [ human-robotic prosthesis collaboration ] [ continuous control ]
{kind=link}
This is the first attempt at considering human influence in the reinforcement learning control of a robotic lower limb prosthesis toward symmetrical walking in real world situations. We propose a collaborative multi-agent reinforcement learning (cMARL) solution framework for this highly complex and challenging human-prosthesis collaboration (HPC) problem. The design of an automatic controller of the robot within the HPC context is based on accessible physical features or measurements that are known to affect walking performance. Comparisons are made with the current state-of-the-art robot control designs, which are single-agent based, as well as existing MARL solution approaches tailored to the problem, including multi-agent deep deterministic policy gradient (MADDPG) and counterfactual multi-agent policy gradient (COMA). Results show that, when compared to these approaches, treating the human and robot as coupled agents and using estimated human adaption in robot control design can achieve lower stage cost, peak error, and symmetry value to ensure better human walking performance. Additionally, our approach accelerates learning of walking tasks and increases learning success rate. The proposed framework can potentially be further developed to examine how human and robotic lower limb prosthesis interact, an area that little is known about. Advancing cMARL toward real world applications such as HPC for normative walking sets a good example of how AI can positively impact on people’s lives.