Poster
in
Workshop: Workshop on neuro Causal and Symbolic AI (nCSI)
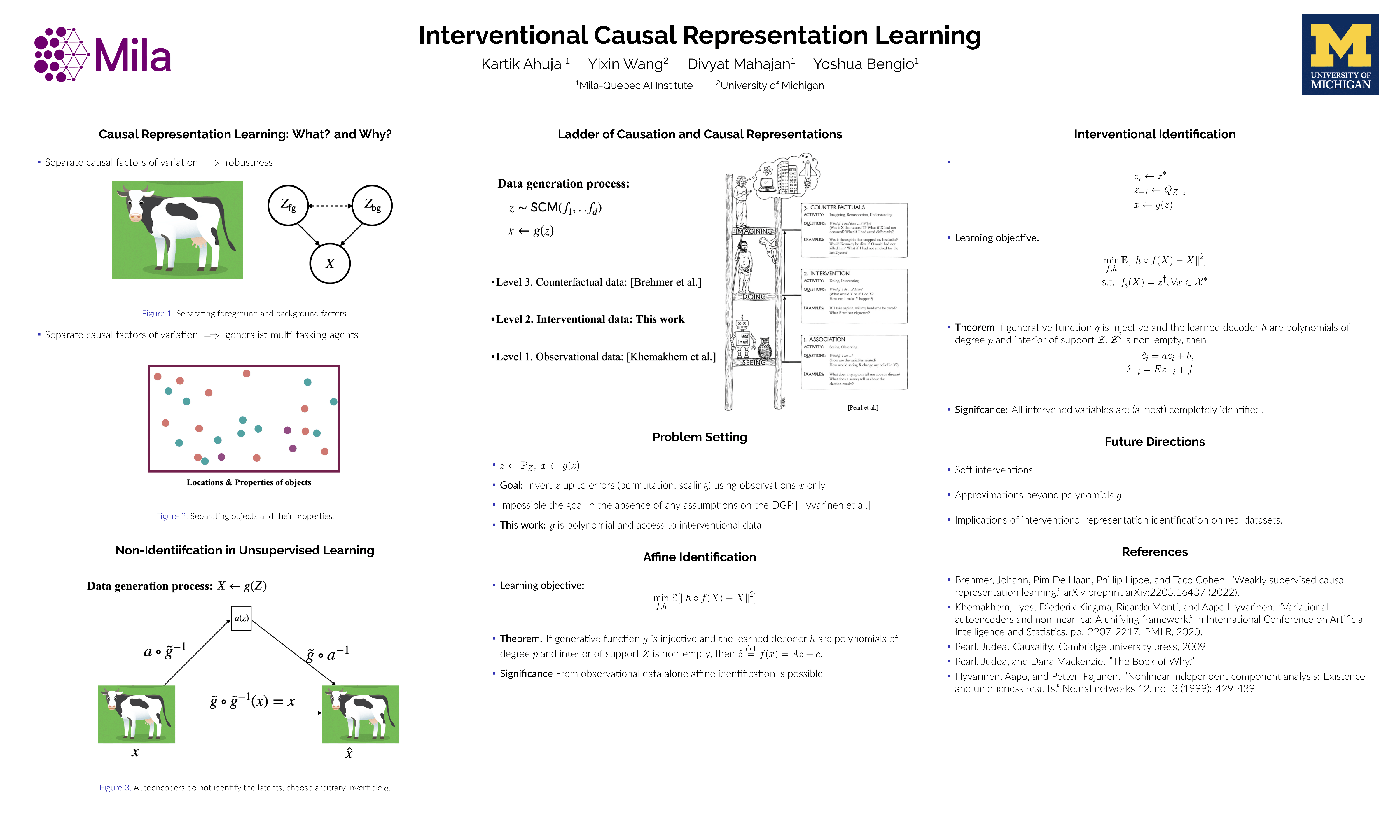
Interventional Causal Representation Learning
Kartik Ahuja · Yixin Wang · Divyat Mahajan · Yoshua Bengio
{kind=link}
The theory of identifiable representation learning aims to build general-purpose methods that extract high-level latent (causal) factors from low-level sensory data. Most existing works focus on identifiable representation learning with observational data, relying on distributional assumptions on latent (causal) factors. However, in practice, we often also have access to interventional data for representation learning, e.g. from robotic manipulation experiments in robotics, from genetic perturbation experiments in genomics, or from electrical stimulation experiments in neuroscience. How can we leverage interventional data to help identify high-level latents? To this end, we explore the role of interventional data for identifiable representation learning in this work. We study the identifiability of latent causal factors with and without interventional data, under minimal distributional assumptions on latents. We prove that, if the true latent maps to the observed high-dimensional data via a polynomial function, then representation learning via minimizing standard reconstruction loss (used in autoencoders) can identify the true latents up to affine transformation. If we further have access to interventional data generated by hard interventions on some latents, then we can identify these intervened latents up to permutation, shift and scaling.