Poster
in
Workshop: Workshop on Machine Learning Safety
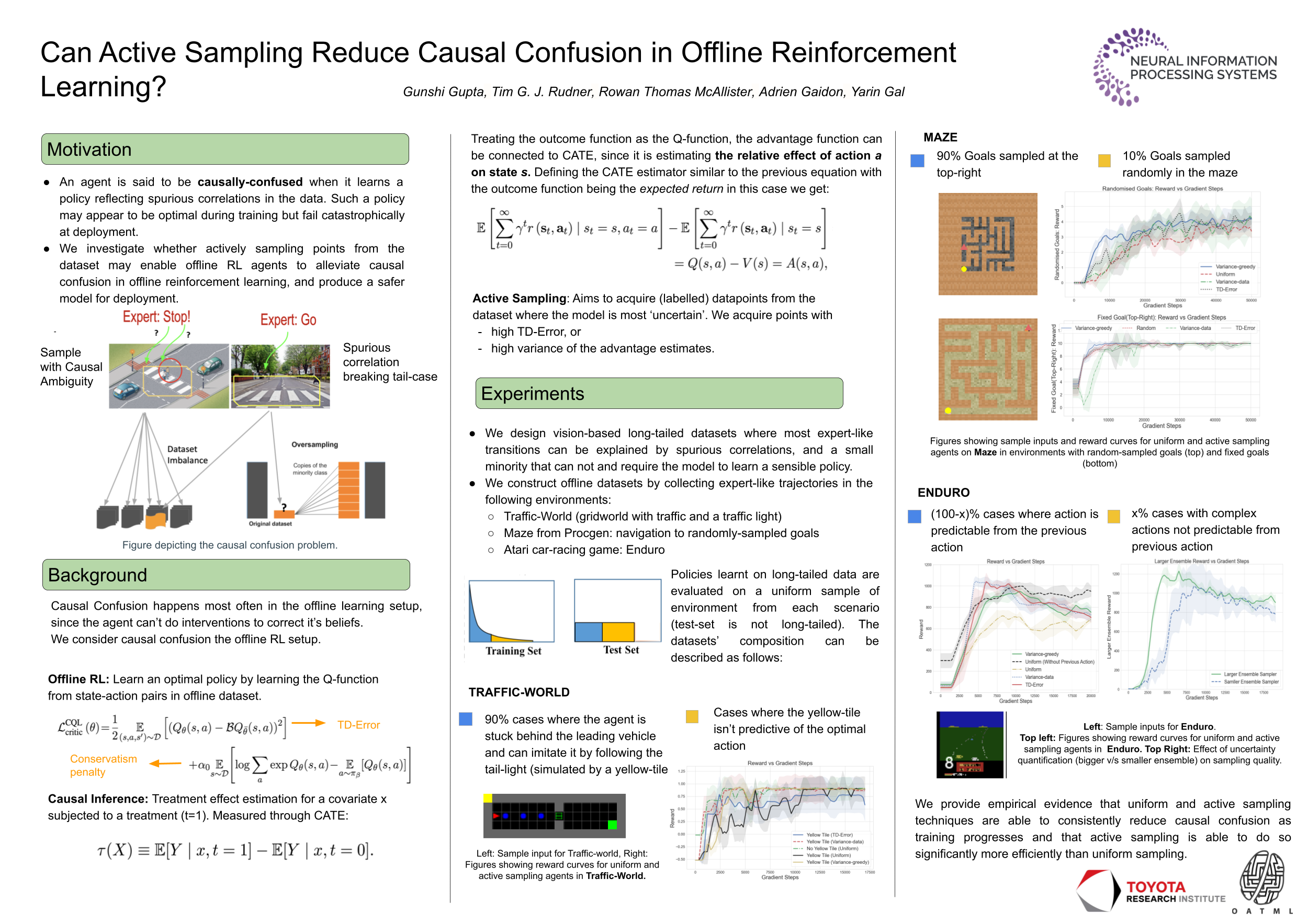
Can Active Sampling Reduce Causal Confusion in Offline Reinforcement Learning?
Gunshi Gupta · Tim G. J. Rudner · Rowan McAllister · Adrien Gaidon · Yarin Gal
{kind=link}
Causal confusion is a phenomenon where an agent learns a policy that reflects imperfect spurious correlations in the data. Such a policy may appear to be optimal during training if most of the training data contains these spurious correlations.This problem gets exacerbated in domains such as robotics with potentially large gaps between open- and closed-loop performance of an agent.In such cases, a causally confused model may appear to perform well according to open-loop metrics but fail catastrophically when deployed in the real world.In this paper, we conduct the first study of causal confusion in offline reinforcement learning.We hypothesize that selectively sampling data points that help disambiguate the underlying causal mechanisms of the environment, may alleviate causal confusion. To investigate this hypothesis, we consider a set of simulated setups to study causal confusion and the ability of active sampling schemes to reduce its effects.We provide empirical evidence that random and active sampling schemes are able to consistently reduce causal confusion as training progresses and that active sampling is able to do so more efficiently than uniform sampling.