Poster
in
Workshop: Deep Reinforcement Learning Workshop
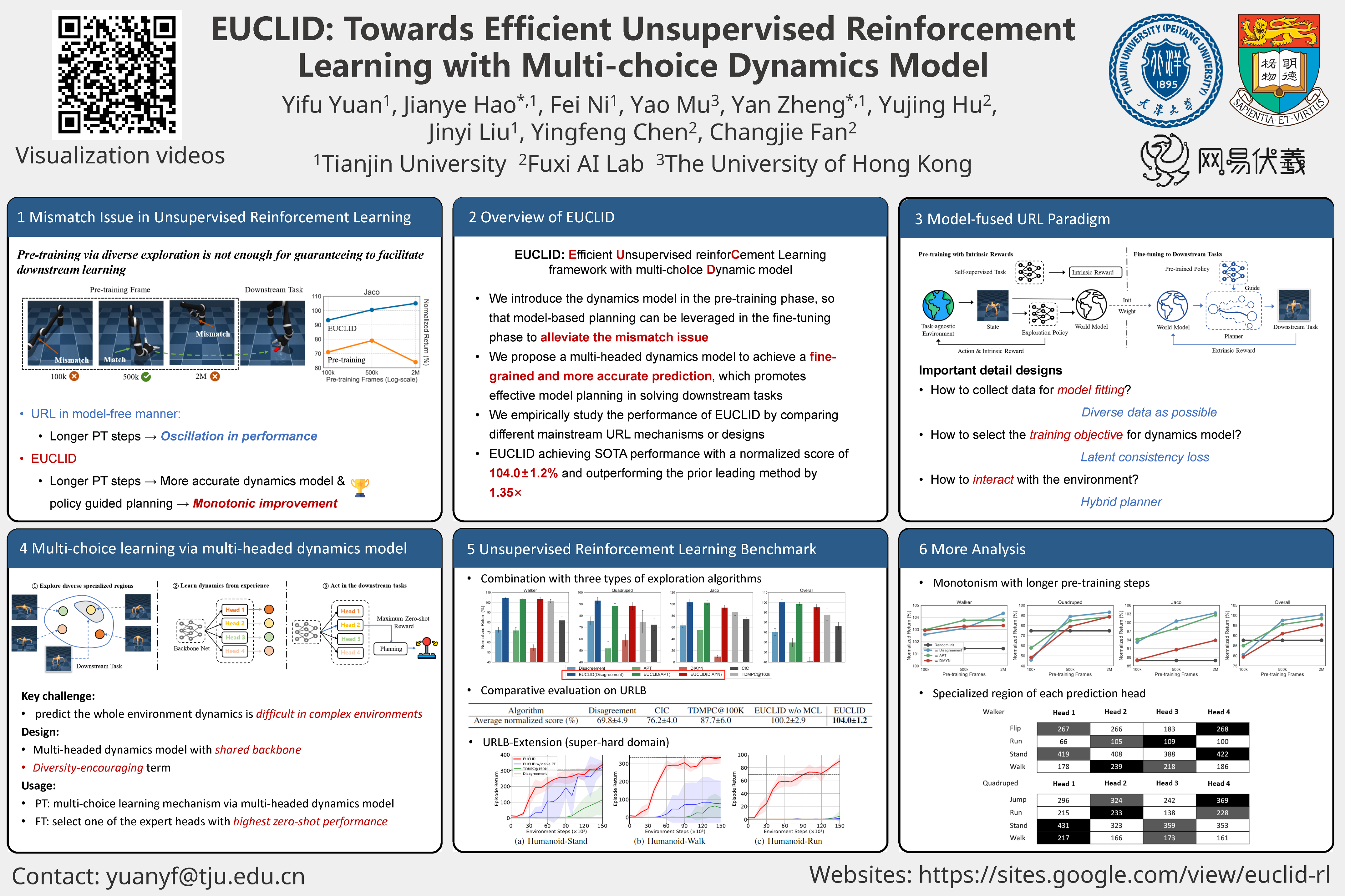
EUCLID: Towards Efficient Unsupervised Reinforcement Learning with Multi-choice Dynamics Model
Yifu Yuan · Jianye Hao · Fei Ni · Yao Mu · YAN ZHENG · Yujing Hu · Jinyi Liu · Yingfeng Chen · Changjie Fan
{kind=link}
Unsupervised reinforcement learning (URL) poses a promising paradigm to learn useful behaviors in a task-agnostic environment without the guidance of extrinsic rewards to facilitate the fast adaptation of various downstream tasks. Previous works focused on the pre-training in a model-free manner while lacking the study of transition dynamics modeling that leaves a large space for the improvement of sample efficiency in downstream tasks. To this end, we propose an Efficient Unsupervised Reinforcement Learning Framework with Multi-choice Dynamics model (EUCLID), which introduces a novel model-fused paradigm to jointly pre-train the dynamics model and unsupervised exploration policy in the pre-training phase, thus better leveraging the environmental samples and improving the downstream task sampling efficiency. However, constructing a generalizable model which captures the local dynamics under different behaviors remains a challenging problem. We introduce the multi-choice dynamics model that covers different local dynamics under different behaviors concurrently, which uses different heads to learn the state transition under different behaviors during unsupervised pre-training and selects the most appropriate head for prediction in the downstream task. Experimental results in the manipulation and locomotion domains demonstrate that EUCLID achieves state-of-the-art performance with high sample efficiency, basically solving the state-based URLB benchmark and reaching a mean normalized score of 104.0±1.2% in downstream tasks with 100k fine-tuning steps, which is equivalent to DDPG’s performance at 2M interactive steps with 20× more data. Codes and visualization videos are released on our homepage.