Poster
in
Workshop: Deep Reinforcement Learning Workshop
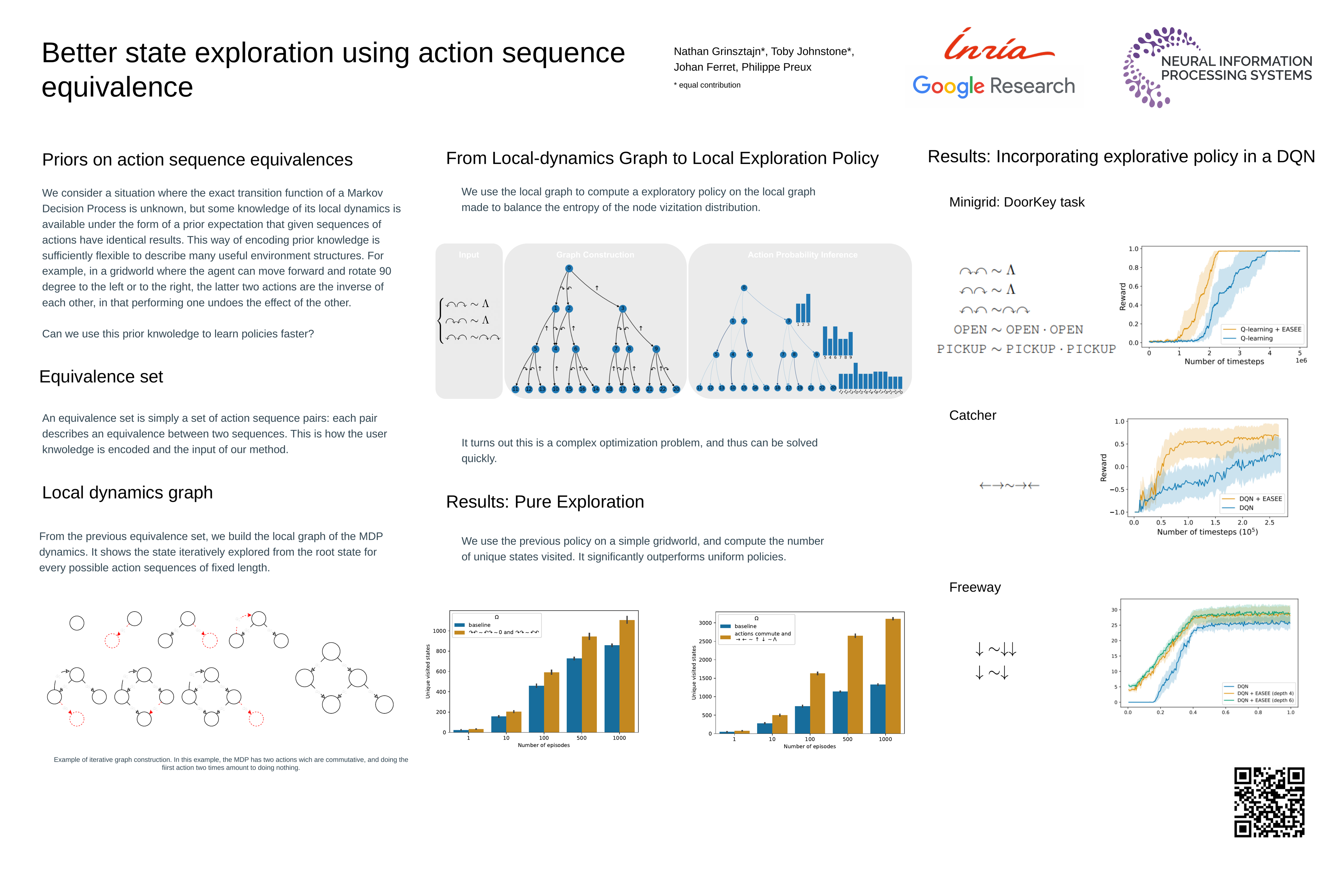
Better state exploration using action sequence equivalence
Nathan Grinsztajn · Toby Johnstone · Johan Ferret · philippe preux
{kind=link}
Abstract:
Incorporating prior knowledge in reinforcement learning algorithms is mainly an open question. Even when insights about the environment dynamics are available, reinforcement learning is traditionally used in a \emph{tabula rasa} setting and must explore and learn everything from scratch.In this paper, we consider the problem of exploiting priors about action sequence equivalence: that is, when different sequences of actions produce the same effect.We propose a new local exploration strategy calibrated to minimize collisions and maximize new state visitations. We show that this strategy can be computed at little cost, by solving a convex optimization problem.By replacing the usual $\epsilon$-greedy strategy in a DQN, we demonstrate its potential in several environments with various dynamic structures.
Chat is not available.