Poster
in
Workshop: Deep Reinforcement Learning Workshop
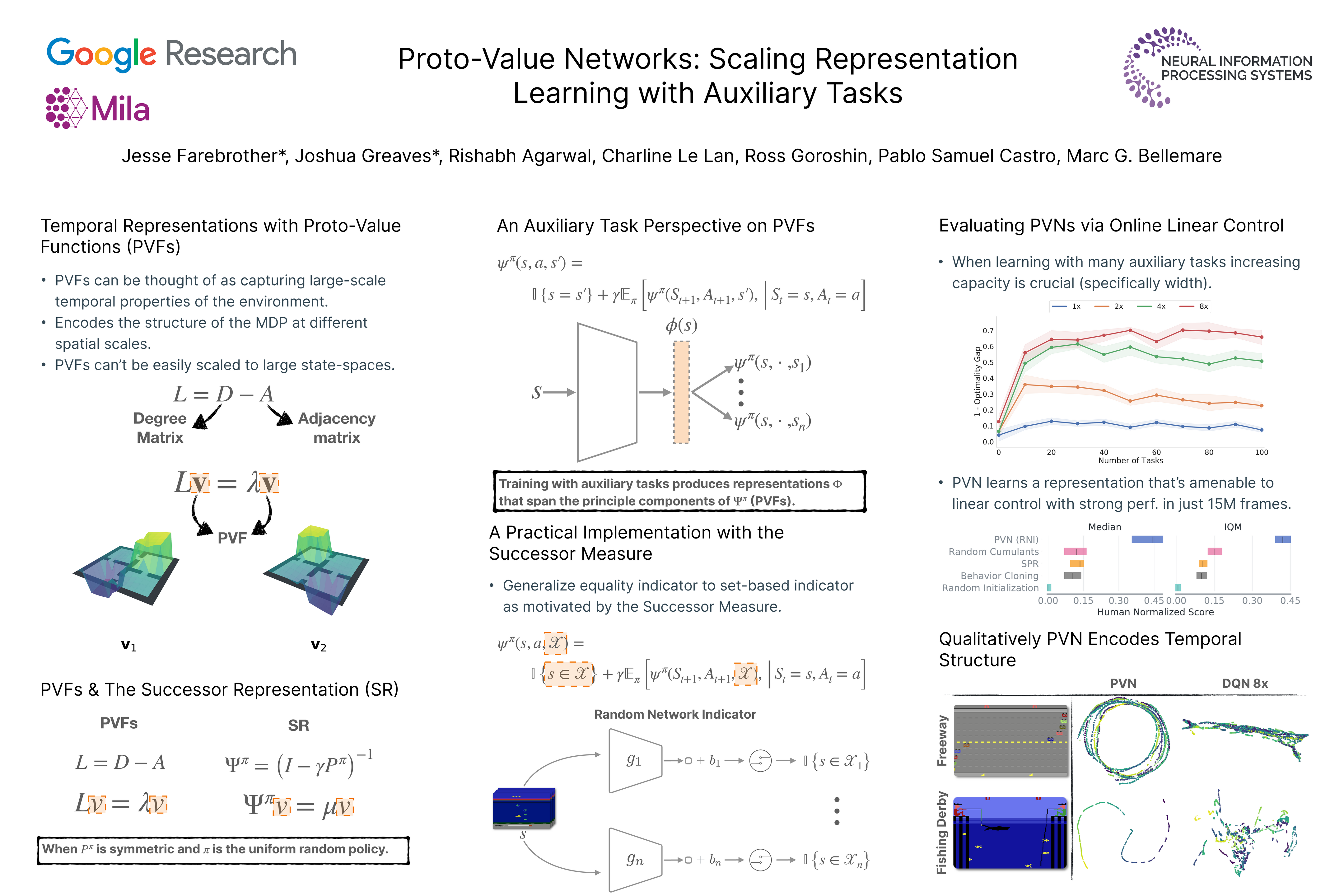
Proto-Value Networks: Scaling Representation Learning with Auxiliary Tasks
Jesse Farebrother · Joshua Greaves · Rishabh Agarwal · Charline Le Lan · Ross Goroshin · Pablo Samuel Castro · Marc Bellemare
{kind=link}
Auxiliary tasks improve the representations learned by deep reinforcement learning agents. Analytically, their effect is reasonably well-understood; in practice, how-ever, their primary use remains in support of a main learning objective, rather than as a method for learning representations. This is perhaps surprising given that many auxiliary tasks are defined procedurally, and hence can be treated as an essentially infinite source of information about the environment. Based on this observation, we study the effectiveness of auxiliary tasks for learning rich representations, focusing on the setting where the number of tasks and the size of the agent’s network are simultaneously increased. For this purpose, we derive a new family of auxiliary tasks based on the successor measure. These tasks are easy to implement and have appealing theoretical properties. Combined with a suitable off-policy learning rule, the result is a representation learning algorithm that can be understood as extending Mahadevan & Maggioni (2007)’s proto-value functions to deep reinforcement learning – accordingly, we call the resulting object proto-value networks. Through a series of experiments on the Arcade Learning Environment, we demonstrate that proto-value networks produce rich features that may be used to obtain performance comparable to established algorithms, using only linear approximation and a small number (~4M) of interactions with the environment’s reward function.