Poster
in
Affinity Workshop: Black in AI
Deep Learning-Based Multi-Vehicle Tracking Model with Speed Estimator for the MLK Smart Corridor in Downtown Chattanooga, TN
Yasir Hassan
Keywords: [ Computer Vision ]
{kind=link}
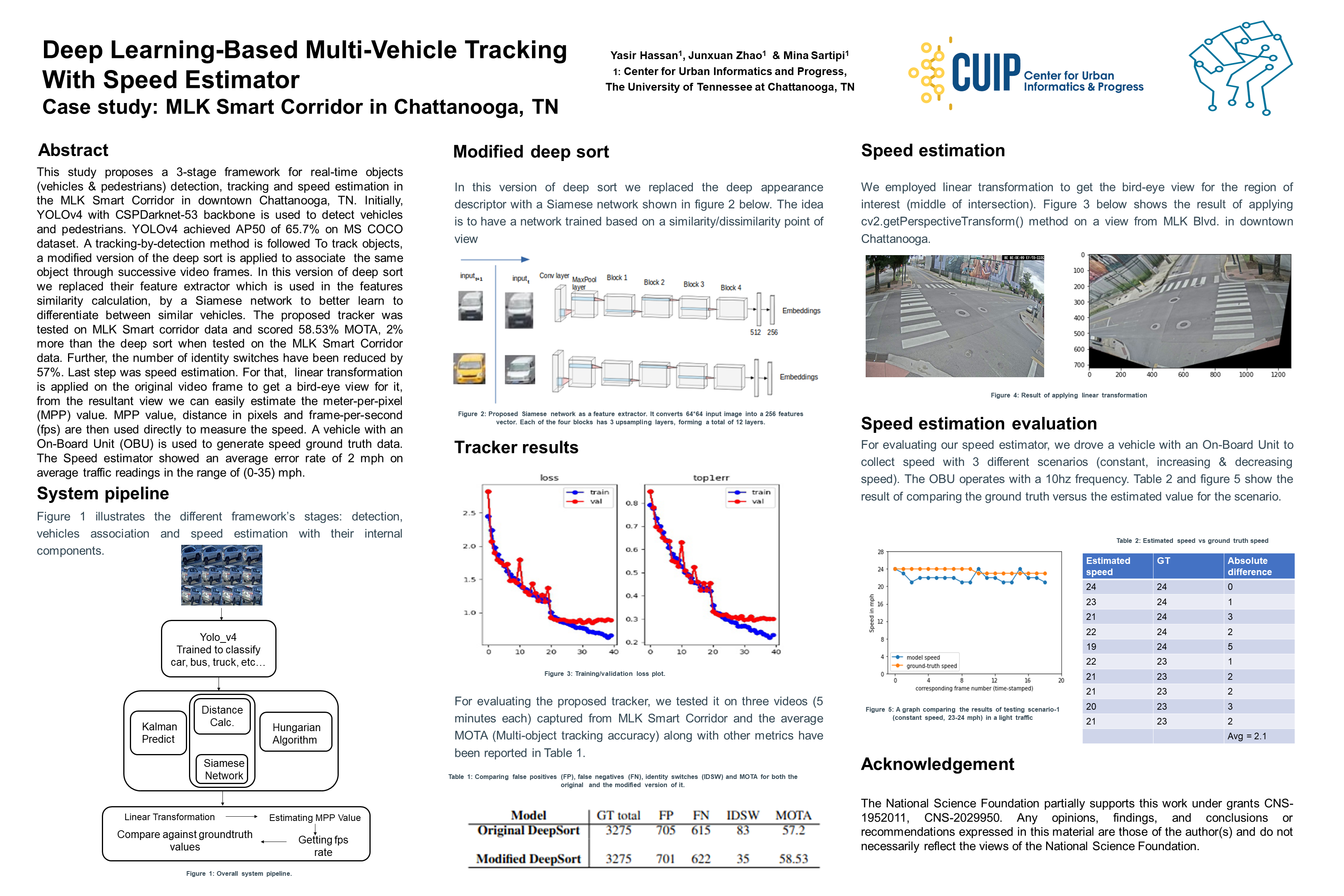
In this work we proposed a three-stages framework for real-time vehicles detection, tracking and speed estimation in the MLK Smart Corridor (A testbed for smart cities and connected/automated vehicles in downtown Chattanooga). YoloV4 is used to detect vehicles throughout successive frames. The Siamese network was trained with UA-Detrac and MLK Smart Corridor data. The proposed tracker was tested on MLK Smart Corridor data and scored 58.53% MOTA, ~2% percent more than Deep Sort, and the number of the identity switches have been reduced by 57%. Linear transformation is applied on the camera view to get a bird-eye view, from which we can estimate the corresponding meter-per-pixel (MPP). MPP along with the fps are used to get the speed directly. A vehicle with an On-Board Unit (OBU) is used to generate speed ground truth data. This generated data have been verified using a dashboard camera. The OBU readings' error rate was found to be ~0.89 mph. The speed estimator showed an average error rate of 2 mph on average traffic readings in the range of (0-35) mph.