Poster
in
Workshop: 3rd Offline Reinforcement Learning Workshop: Offline RL as a "Launchpad"
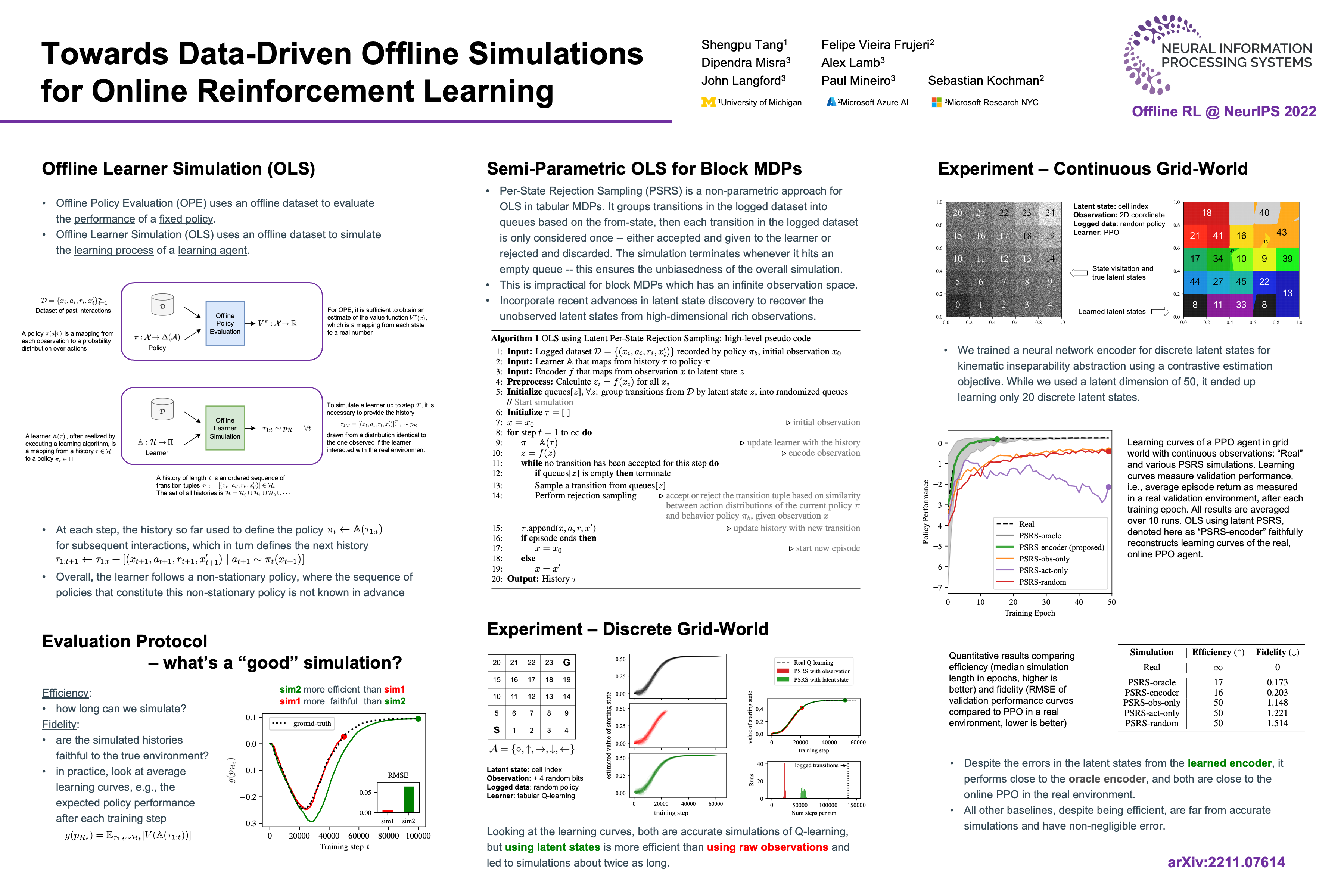
Towards Data-Driven Offline Simulations for Online Reinforcement Learning
Shengpu Tang · Felipe Vieira Frujeri · Dipendra Misra · Alex Lamb · John Langford · Paul Mineiro · Sebastian Kochman
{kind=link}
Modern decision-making systems, from robots to web recommendation engines, are expected to adapt: to user preferences, changing circumstances or even new tasks. Yet, it is still uncommon to deploy a dynamically learning agent (rather than a fixed policy) to a production system, as it's perceived as unsafe. Using historical data to reason about learning algorithms, similar to offline policy evaluation (OPE) applied to fixed policies, could help practitioners evaluate and ultimately deploy such adaptive agents to production. In this work, we formalize offline learner simulation (OLS) for reinforcement learning (RL) and propose a novel evaluation protocol that measures both fidelity and efficiency. For environments with complex high-dimensional observations, we propose a semi-parametric approach that leverages recent advances in latent state discovery. In preliminary experiments, we show the advantage of our approach compared to fully non-parametric baselines.