Poster
in
Workshop: Machine Learning for Autonomous Driving
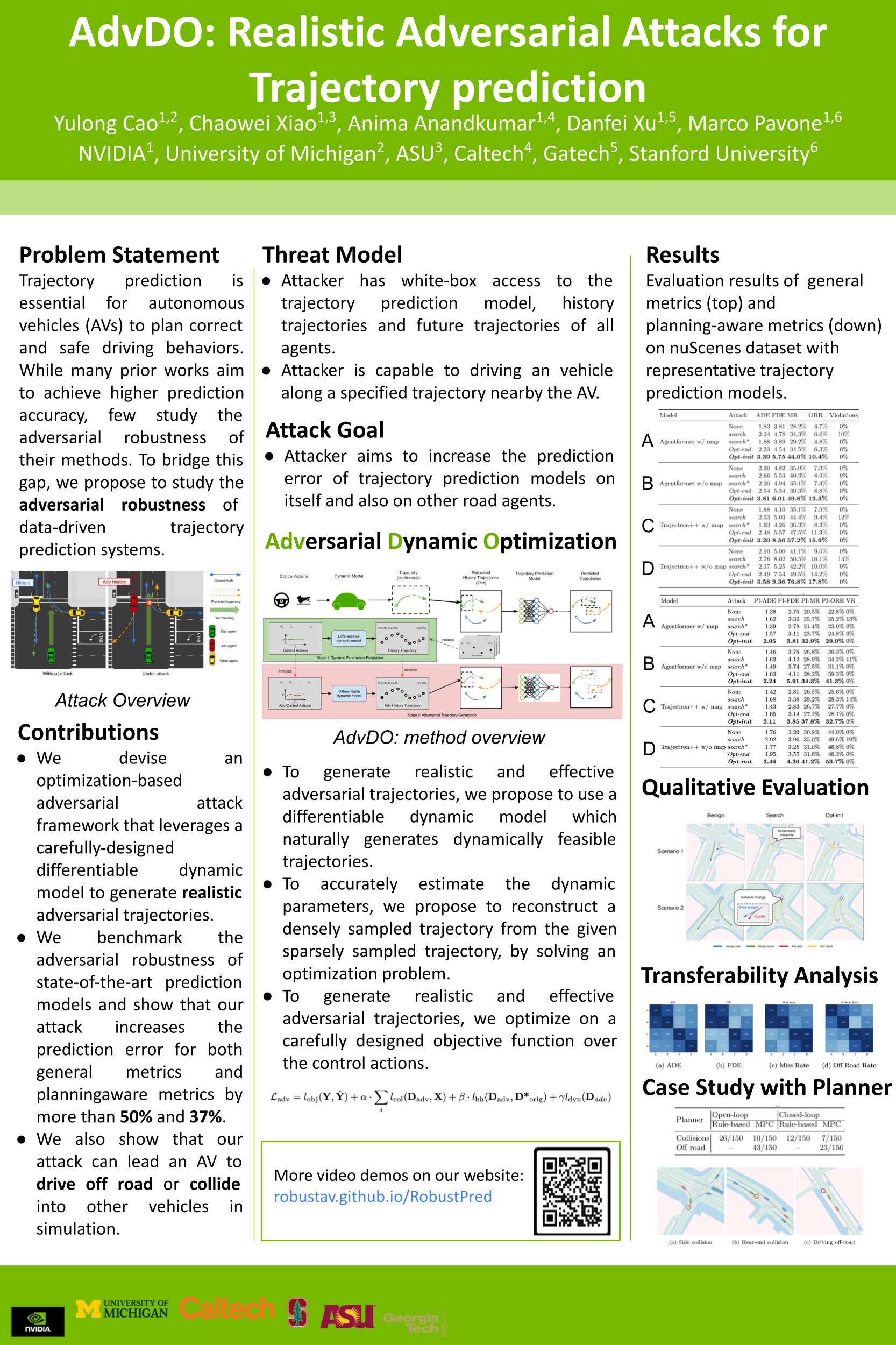
AdvDO: Realistic Adversarial Attacks for Trajectory Prediction
Yulong Cao · Chaowei Xiao · Anima Anandkumar · Danfei Xu · Marco Pavone
{kind=link}
Trajectory prediction is essential for autonomous vehicles(AVs) to plan correct and safe driving behaviors. While many prior works aim to achieve higher prediction accuracy, few studies the adversarial robustness of their methods. To bridge this gap, we propose to study the adversarial robustness of data-driven trajectory prediction systems. We devise an optimization-based adversarial attack framework that leverages a carefully-designed differentiable dynamic model to generate realistic adversarial trajectories. Empirically, we benchmark the adversarial robustness of state-of-the-art prediction models and show that our attack increases the prediction error for both general metrics and planning-aware metrics by more than 50% and 37%. We also show that our attackcan lead an AV to drive off-road or collide into other vehicles in simulation. Finally, we demonstrate how to mitigate the adversarial attacks using an adversarial training scheme.