Poster
in
Workshop: Machine Learning for Autonomous Driving
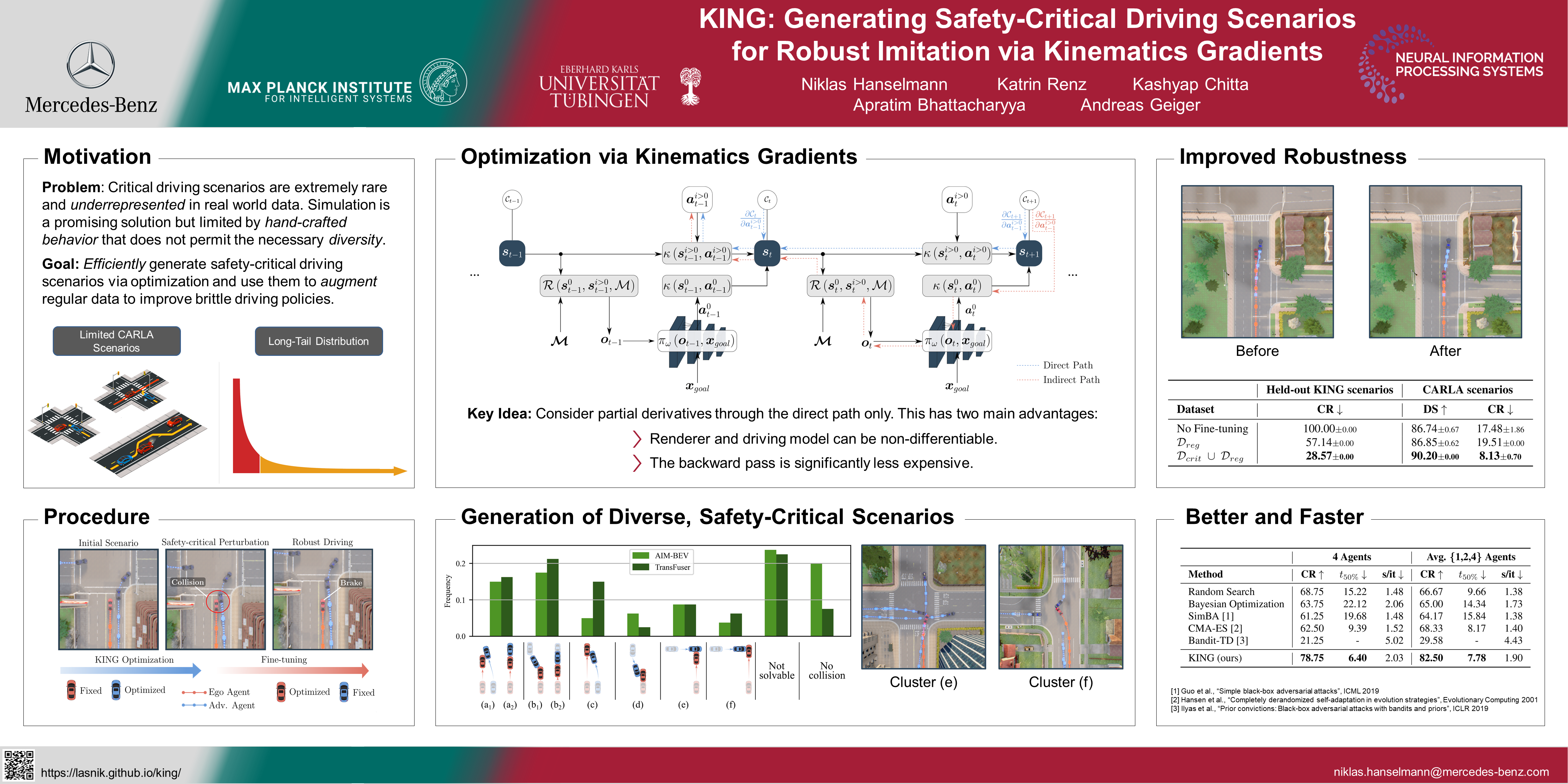
KING: Generating Safety-Critical Driving Scenarios for Robust Imitation via Kinematics Gradients
Niklas Hanselmann · Katrin Renz · Kashyap Chitta · Apratim Bhattacharyya · Andreas Geiger
{kind=link}
Simulators offer the possibility of scalable development of self-driving systems. However, current driving simulators exhibit naïve behavior models for background traffic. Hand-tuned scenarios are typically used to induce safety-critical situations. An alternative approach is to adversarially perturb the background traffic trajectories. In this paper, we study this approach to safety-critical driving scenario generation using the CARLA simulator. We use a kinematic bicycle model as a proxy to the simulator's true dynamics and observe that gradients through this proxy model are sufficient for optimizing the background traffic trajectories. Based on this finding, we propose KING, which generates safety-critical driving scenarios with a 20% higher success rate than black-box optimization, which previous work relies on. Furthermore, we demonstrate that the generated scenarios can be used to fine-tune imitation learning agents, leading to improved collision avoidance.