Poster
in
Workshop: Machine Learning for Autonomous Driving
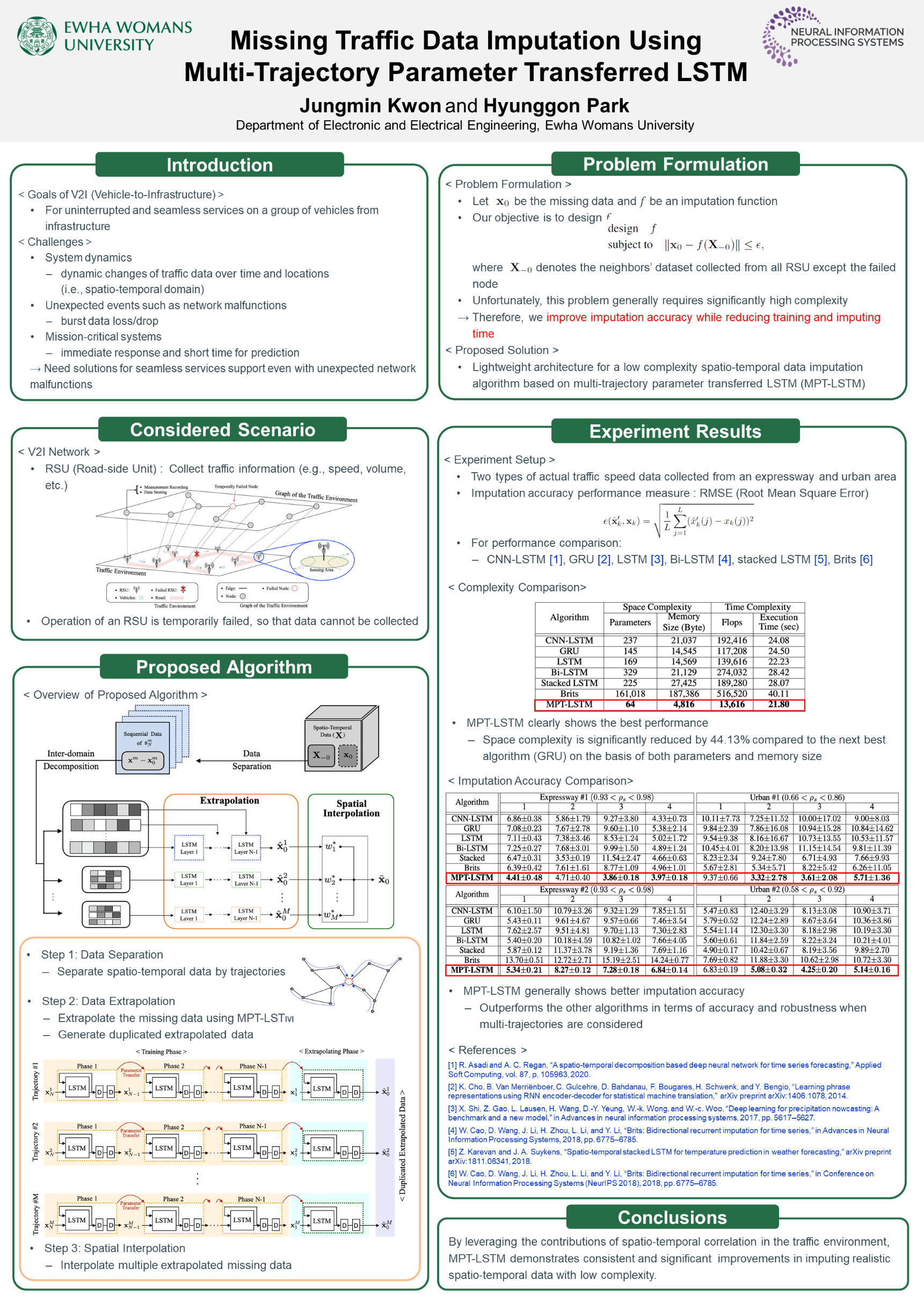
Missing Traffic Data Imputation Using Multi-Trajectory Parameter Transferred LSTM
Jungmin Kwon · Hyunggon Park
{kind=link}
We propose a lightweight data imputation algorithm for spatio-temporal data based on multi-trajectory parameter transferred Long Short-Term Memory (MPT-LSTM) in a traffic environment where the roadside units (RSUs) collect traffic information. In this paper, we consider a scenario where the RSUs are accidentally broken down or have malfunctioned but cannot be immediately recovered, temporally incurring massive data loss. Unlike existing imputation algorithms based on LSTM, the proposed architecture reduces the dimensions of input data by separating the data into trajectories in the spatio-temporal domain, thereby allowing us to train the model with irreducible LSTMs for each single data input. The designed approach can transfer parameters between irreducible LSTM phases, which trains data collected from an RSU, adopts spatial interpolation, and shows robust imputation accuracy for the trajectories. We show that the proposed MPT-LSTM improves imputation accuracy and significantly reduces the number of parameters and operations, which leads to a reduction in LSTM memory space and execution time. The proposed algorithm can also show robust and efficient performance in the experiments using real-world vehicle speed data collected from expressways and urban areas.