Poster
in
Workshop: Machine Learning for Autonomous Driving
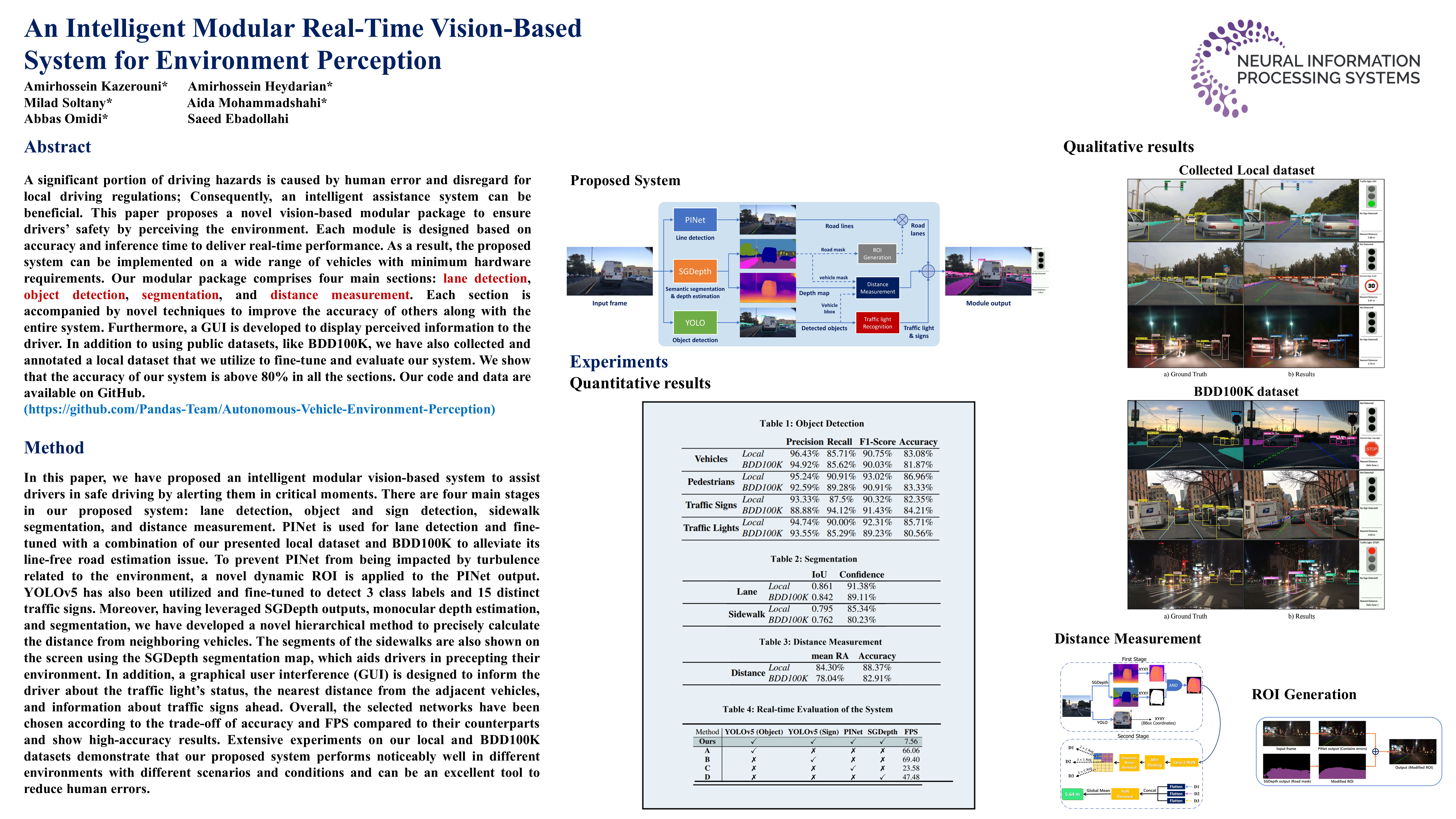
An Intelligent Modular Real-Time Vision-Based System for Environment Perception
Amirhossein Kazerouni · Amirhossein Heydarian · Milad Soltany · Aida Mohammadshahi · Abbas Omidi · Saeed Ebadollahi
{kind=link}
A significant portion of driving hazards is caused by human error and disregard for local driving regulations; Consequently, an intelligent assistance system can be beneficial. This paper proposes a novel vision-based modular package to ensure drivers' safety by perceiving the environment. Each module is designed based on accuracy and inference time to deliver real-time performance. As a result, the proposed system can be implemented on a wide range of vehicles with minimum hardware requirements. Our modular package comprises four main sections: lane detection, object detection, segmentation, and monocular depth estimation. Each section is accompanied by novel techniques to improve the accuracy of others along with the entire system. Furthermore, a GUI is developed to display perceived information to the driver. In addition to using public datasets, like BDD100K, we have also collected and annotated a local dataset that we utilize to fine-tune and evaluate our system. We show that the accuracy of our system is above 80% in all the sections. Our code and data will be available on our GitHub page.