Poster
in
Workshop: Foundation Models for Decision Making
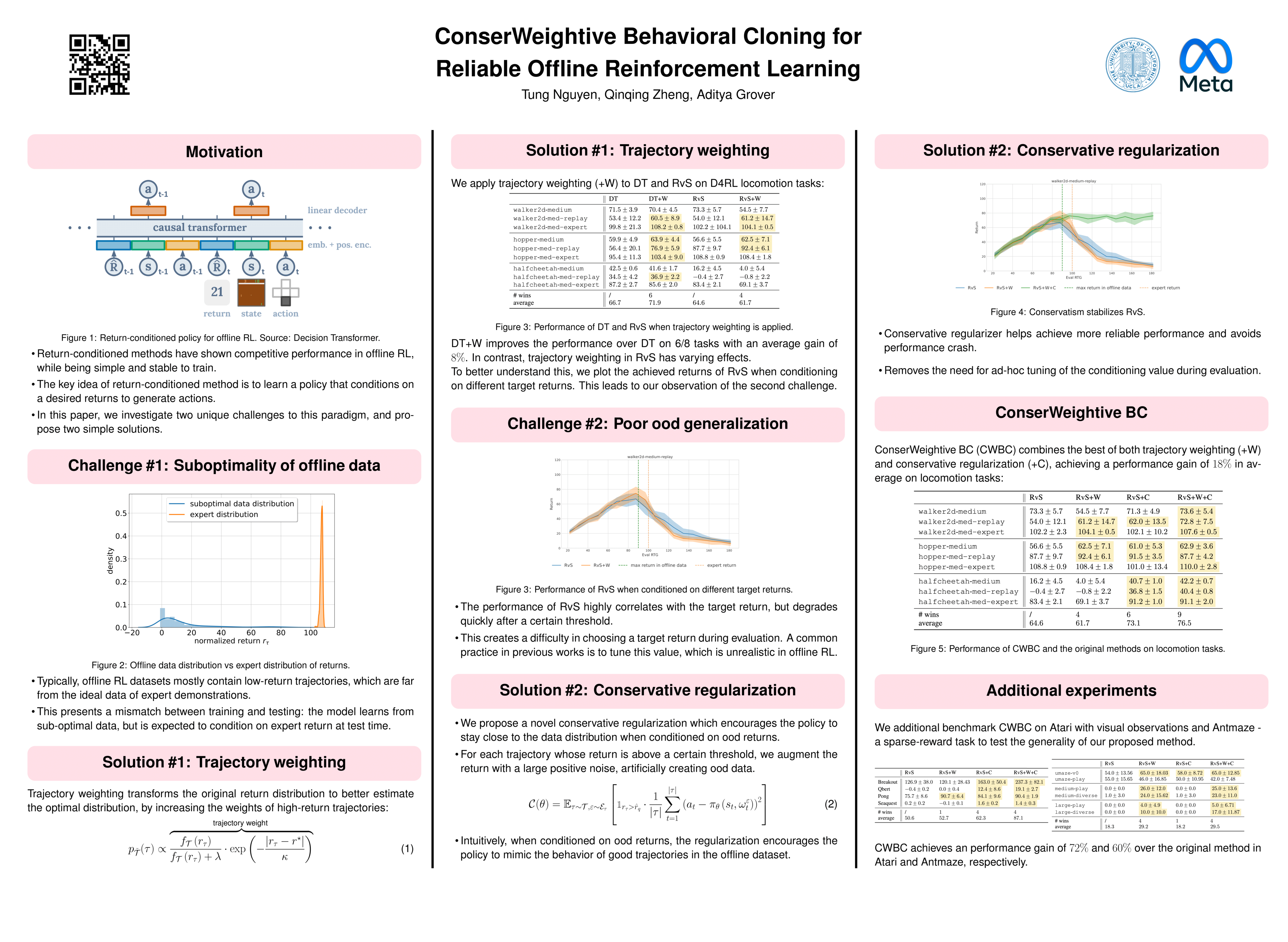
ConserWeightive Behavioral Cloning for Reliable Offline Reinforcement Learning
Tung Nguyen · Qinqing Zheng · Aditya Grover
{kind=link}
The goal of offline reinforcement learning (RL) is to learn near-optimal policies from static logged datasets, thus sidestepping expensive online interactions. Behavioral cloning (BC) provides a straightforward solution to offline RL by mimicking offline trajectories via supervised learning. Recent advances~\cite{chen2021decision, janner2021offline, emmons2021rvs} have shown that by conditioning on desired future returns, BC can perform competitively to their value-based counterparts, while enjoying much more simplicity and training stability. However, the distribution of returns in the offline dataset can be arbitrarily skewed and suboptimal, which poses a unique challenge for conditioning BC on expert returns at test time. We propose ConserWeightive Behavioral Cloning (\name), a simple and effective method for improving the performance of conditional BC for offline RL with two key components: trajectory weighting and conservative regularization. Trajectory weighting addresses the bias-variance tradeoff in conditional BC and provides a principled mechanism to learn from both low return trajectories (typically plentiful) and high return trajectories (typically few). Further, we analyze the notion of conservatism in existing BC methods, and propose a novel conservative regularizer that explicitly encourages the policy to stay close to the data distribution. The regularizer helps achieve more reliable performance, and removes the need for ad-hoc tuning of the conditioning value during evaluation. We instantiate \name{} in the context of Reinforcement Learning via Supervised Learning (RvS)~\cite{emmons2021rvs} and Decision Transformer (DT)~\citep{chen2021decision}, and empirically show that it significantly boosts the performance and stability of prior methods on various offline RL benchmarks.