Poster
in
Workshop: Reinforcement Learning for Real Life (RL4RealLife) Workshop
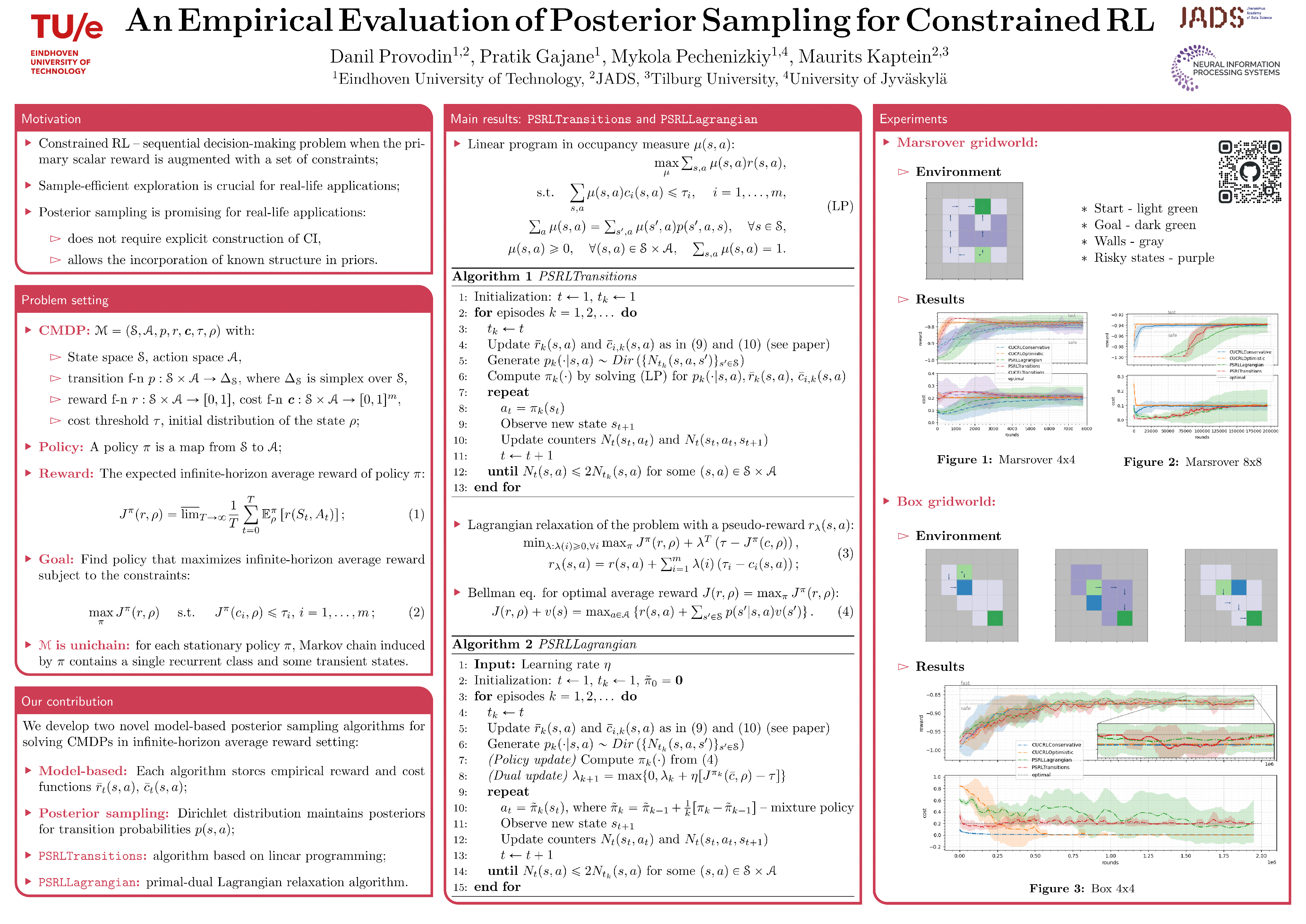
An Empirical Evaluation of Posterior Sampling for Constrained Reinforcement Learning
Danil Provodin · Pratik Gajane · Mykola Pechenizkiy · Maurits Kaptein
{kind=link}
Abstract:
We study a posterior sampling approach to efficient exploration in constrained reinforcement learning. Alternatively to existing algorithms, we propose two simple algorithms that are more efficient statistically, simpler to implement and computationally cheaper. The first algorithm is based on a linear formulation of CMDP, and the second algorithm leverages the saddle-point formulation of CMDP. Our empirical results demonstrate that, despite its simplicity, posterior sampling achieves state-of-the-art performance and, in some cases, significantly outperforms optimistic algorithms.
Chat is not available.