Poster
in
Workshop: OPT 2022: Optimization for Machine Learning
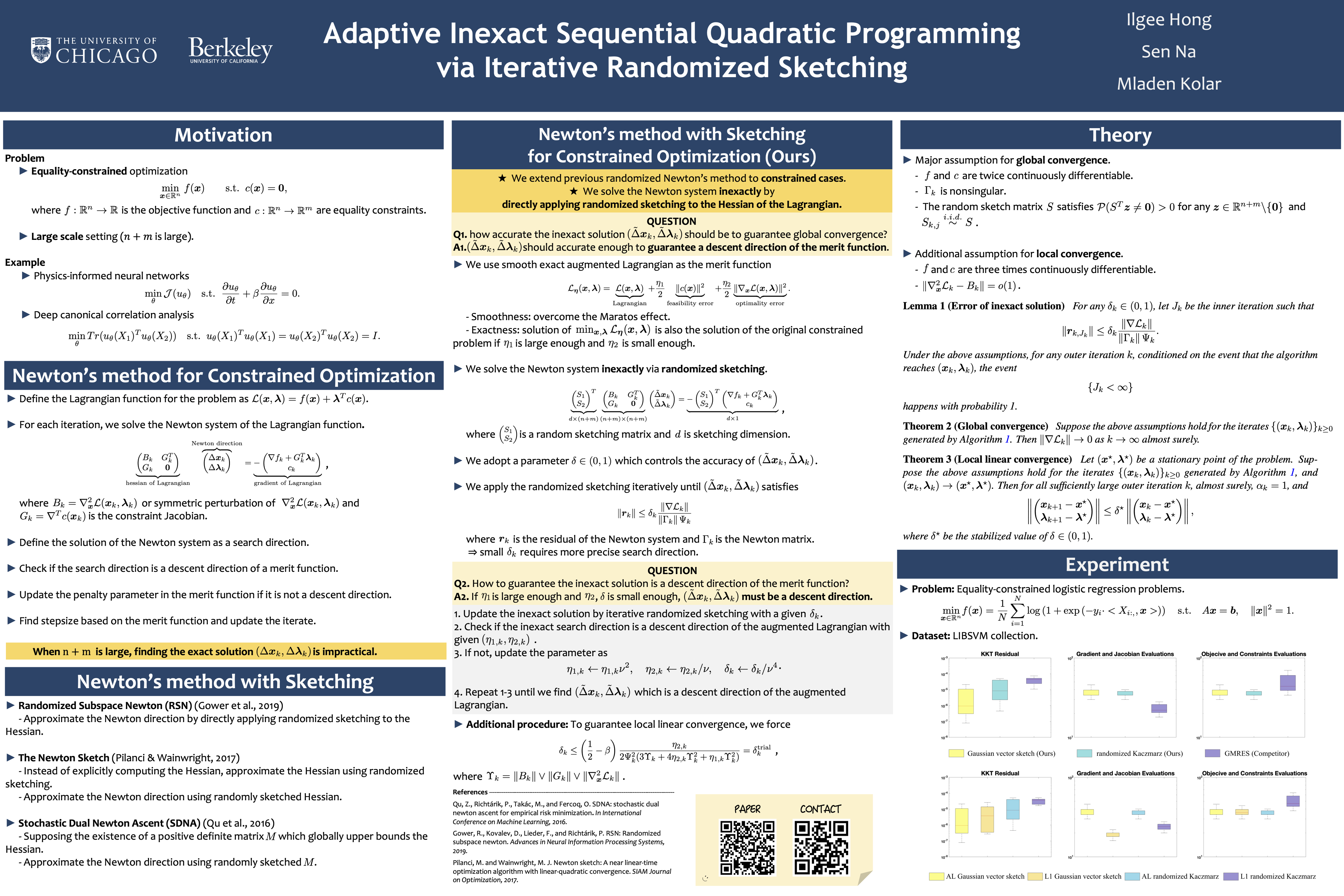
Adaptive Inexact Sequential Quadratic Programming via Iterative Randomized Sketching
Ilgee Hong · Sen Na · Mladen Kolar
{kind=link}
We consider solving nonlinear optimization problems with equality constraints. We propose a randomized algorithm based on sequential quadratic programming (SQP) with a differentiable exact augmented Lagrangian as the merit function. In each SQP iteration, we solve the Newton system inexactly via iterative randomized sketching. The accuracy of the inexact solution and the penalty parameter of the augmented Lagrangian are adaptively controlled in the algorithm to ensure that the inexact random search direction is a descent direction of the augmented Lagrangian. This allows us to establish global convergence almost surely. Moreover, we show that a unit stepsize is admissible for the inexact search direction provided the iterate lies in a neighborhood of the solution. Based on this result, we show that the proposed algorithm exploits local linear convergence. We apply the algorithm on benchmark nonlinear problems in CUTEst test set and on constrained logistic regression with datasets from LIBSVM to demonstrate its superior performance.