Poster
in
Workshop: Gaussian Processes, Spatiotemporal Modeling, and Decision-making Systems
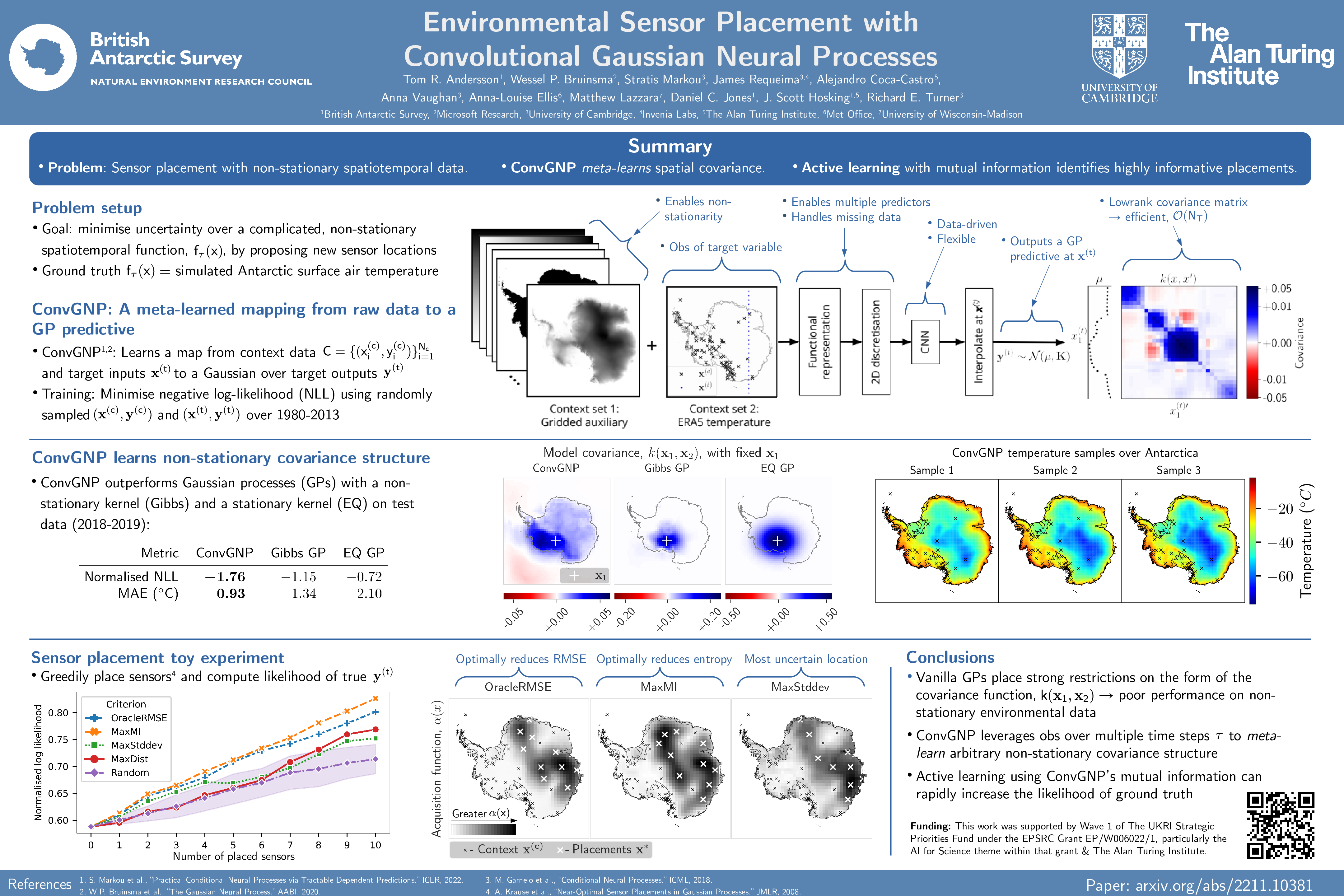
Active Learning with Convolutional Gaussian Neural Processes for Environmental Sensor Placement
Tom Andersson · Wessel Bruinsma · Efstratios Markou · Daniel C. Jones · Scott Hosking · James Requeima · Anna Vaughan · Anna-Louise Ellis · Matthew Lazzara · Richard Turner
{kind=link}
Deploying environmental measurement stations can be a costly and time consuming procedure, especially in regions which are remote or otherwise difficult to access, such as Antarctica. Therefore, it is crucial that sensors are placed as efficiently as possible, maximising the informativeness of their measurements. Previous approaches for identifying salient placement locations typically model the data with a Gaussian process (GP; Williams and Rasmussen, 2006). However, designing a GP covariance which captures the complex behaviour of non-stationary spatiotemporal data is a difficult task. Further, the computational cost of these models make them challenging to scale to large environmental datasets. In this work, we explore using convolutional Gaussian neural processes (ConvGNPs; Bruinsma et al., 2021; Markou et al., 2022) to address these issues. A ConvGNP is a meta-learning model which uses a neural network to parameterise a GP predictive. Our model is data-driven, flexible, efficient, and permits gridded or off-grid input data. Using simulated surface temperature fields over Antarctica as ground truth, we show that a ConvGNP outperforms a simple GP baseline in terms of predictive performance. We then use the ConvGNP in a temperature sensor placement toy experiment, yielding promising results.